美 카네기멜론대 연구팀, 모바일 매니퓰레이터 조작용 머리 착용 장치 개발올봄 런던에서 열리는 'IEEE ICRA'에서 발표 예정
승인 2023.03.24 14:25:54
▲ HAT를 착용한 사용자가 모바일 매니퓰레이터를 이용해 담요를 걷고 있다.
미 카네기멜론대(CMU) 로봇연구소(RI) 연구팀은 운동장애를 갖고 있는 사람들이 활용할 수 있는 모바일 매니퓰레이터 조작을 위한 머리 착용 장치를 개발했다고 20일(현지 시각) 밝혔다.
모자 처럼 생긴 머리 착용 장치를 쓰고 머리를 움직이거나, 음성으로 명령을 내려 모바일 매니퓰레이터를 조작할 수 있다.
연구팀에 따르면 기존의 원격 조작이 가능한 모바일 매니퓰레이터는 개인이 일상적인 활동을 수행하는 데 도움을 줄 수 있지만 수동 조이스틱, 웹 인터페이스 등 기존 기술을 사용할 경우 상당한 수준의 정교한 운동 능력을 갖고 있어야만 한다.
아크힐 파드마나바(Akhil Padmanabha) 로봇공학 박사과정 등 연구팀은 머리 움직임과 음성 인식을 통해 이동 로봇(모바일 매니퓰레이터)을 제어할 수 있는 머리 착용 장치인 'HAT'(Head-Worn Assistive Teleoperation)를 개발했다.
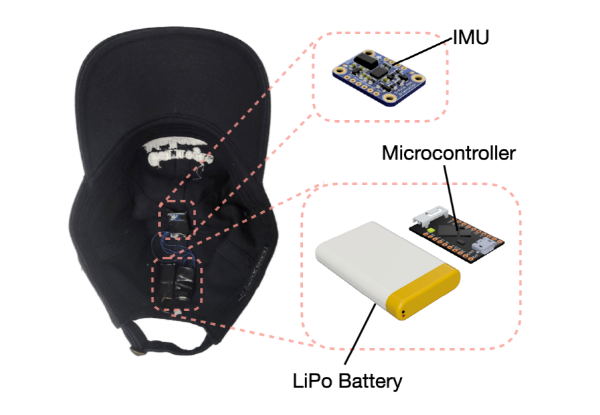
▲ HAT의 내부 구성
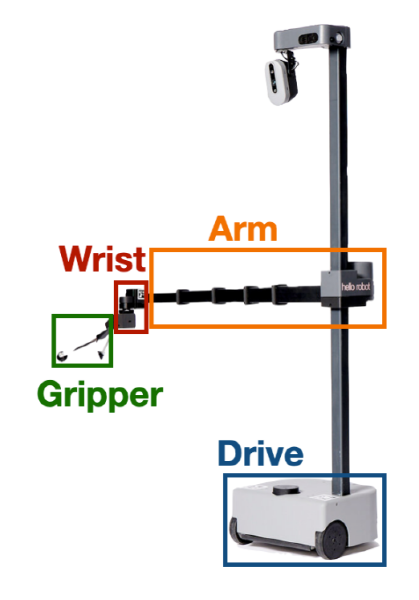
▲ 모바일 매뉴퓰레이터 구성
이 장치는 핸즈프리 마이크를 활용할 수 있으며, 관성측정장치(IMU), 마이크로 컨트롤러, 리튬 폴리머 배터리 등으로 구성돼 있다. HAT는 기존의 다른 인터페이스에 비해 정교한 운동 기술을 덜 필요로 하며, 모바일 매니퓰레이터와 블루투스 방식으로 통신을 한다.
연구팀이 운동 장애가 있는 사람과 그렇지 않은 사람들을 대상으로 컵 회수, 쓰레기 집기, 담요 걷기 등 동작을 테스트한 결과 모바일 매니퓰레이터 조작시 낮은 오류 발생률, 최소한의 노력, 높은 사용 편의성을 구현한 것으로 나타났다.
연구팀은 올 봄 영국 런던에서 열리는 'IEEE 로봇 및 자동화 국제회의'(International Conference on Robotics and Automation)에서 "HAT: Had-Weared Assistive Teleoperation of Mobile Manipulators"를 주제로 연구 성과를 발표할 예정이다.