|
필자는 지난 2월 20일과 21일 강원도 평창에서 열린 Robocup South Korea Open 2023 대회에 참가했다. ‘Bero(best robot)’ 라는 팀이름으로 친구 한명과 같이 Rescue: Line 부문에 출전하게 되었다.
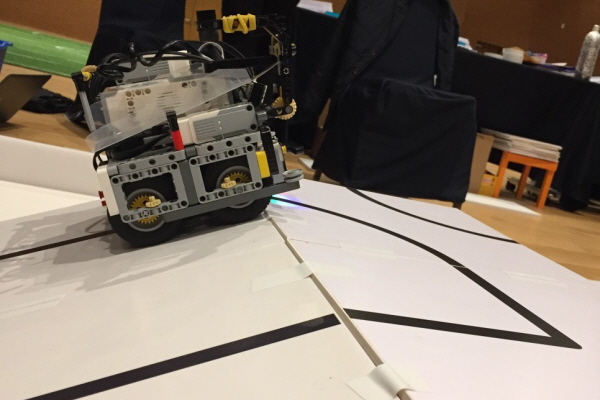
필자가 출전한 Rescue:Line 부문은 오직 로봇만을 이용해서 검은색 라인을 따라 여러 장애물들과 경사를 넘어 부상자들을 안전한 대피소로 옮기고, 출구를 찾아 빠져나와야 하는 경기이다.
이 경기는, 위 사진을 보면 알 수 있듯이, 로봇이 검은 라인을 따라 움직이게끔 제작해야 하는데, 그 위에는 과속방지턱, 장애물(패트병), 시소, 그리고 언덕 등이 있어서 모형이 굉장히 기민하게 구동하게끔 제작해야 했다.
그래서 필자는 모터 두개를 체인으로 연결하여 4륜 구동과 유사한 모형을 제작하였다. 장애물들과 언덕을 힘있게 통과하기 위해 내린 선택이었다. 바퀴가 접지하는 땅의 면적이 커서 그런지 움직임은 상당히 좋아서 라인트레이싱은 잘했지만, 안타깝게도 모형의 무게중심이 맞지 않아 언덕을 오르고 내릴 때 이탈하는 모습을 자주 보여주었다. 그래서 모형의 자이로 센서를 달아서 로봇이 언덕을 인식할 수 있게끔 제작하였다. 그렇게 로봇이 언덕을 인식하면, 평소에 하던 포인트턴이 아니라, 최대한 직진운동을 해서 언덕을 넘어갈 수 있게끔 프로그램하였다.
Rescue:Line 경기는 이름처럼 인명구조를 모티브로 해서 만들어진 경기이다. 그러나 대회 규정상, 굳이 부상자를 대피구역에 놓지 않고 라인트레이싱만 완벽하게 잘한다면 충분히 수상을 노려볼만 했다. 그래서 우리 팀은 인명구조는 포기하고 라인트레이싱에 모든 것을 걸기로 했다. 이를 위해서는 로봇이 모든 장애물들을 통과하게끔 제작해야 했다.
그래서 우선, 터치센서를 모형 앞쪽에 부착하여 장애물을 인식할 수 있게 하였다. 주로 페트병으로 사용되는 장애물은, 항상 검은 라인 위에 자리하고 있기 때문에 필자는 터치센서를 모형 앞쪽에 부착하여 장애물을 인식하게 하였다. 그렇게 장애물을 인식하면, 돌아서 다시 라인을 트레이싱할 수 있도록 말이다.
대회 날 가서 보니, 대부분의 팀들은 PID 제어를 통해 라인을 트레이싱하였다. 이를 간단히 설명하자면 기본적으로 검은색 라인과 흰색 타일의 빛의 반사량을 측정한 후, 비례제어를 통해 라인을 트레이싱하는 방법이다. 그러나 필자는 모형 앞에 위치하는 두개의 컬러 센서가 반사량이 아닌 색상을 인식해 방향성을 결정하도록 프로그램하였다. 왜냐하면 PID 제어는 빛의 반사량을 이용해서 트레이싱하는 것인데, 그렇게 되면 교차로를 지날 때 방향을 결정하는 초록색 교차로 표식을 잘못 인식할 가능성이 생기고, 또 프로그램 속도가 너무 늦어질 수 있어서 반사량이 아닌 색상을 인식해 라인트레이싱할 수 있도록 하였다.
그러나 역시 라인트레이싱만 하면 좀 부족했다. 그래서 필자는 카메라 센서(Pixy 2 cam_LEGO)를 달아서 구급상자와 대피구역을 인식할 수 있게끔 제작하였다. 구급상자는 라인과 5cm 떨어진 무작위 위치에 있기 때문에 이를 인식하기 위해서는 카메라 센서가 필수적이었다. 카메라 센서는 물체의 x,y,z 값을 인식할 수 있는데, 이 값을 가지고 구급상자의 위치를 파악하고 집게를 통해 잡을 수 있게끔 하였다.
그렇게 준비를 마치고 출전한 대회 첫째날, 필자는 실망을 감출 수가 없었다. 이번 대회는 각 팀당 세 번의 기회가 주어졌었다. 그리고 그 세번의 라운드의 합산 점수가 가장 높은 1,2,3등이 수상하는 방식이었다. 그러나 필자의 팀은 1차 라운드 때, 구급상자를 인식하는 값을 잘못 설정했고, 자이로 센서가 정상적으로 작동하지 않았고, 평소에 그렇게 안정적이었던 90도 교차로 마저도 잘 라인트레이싱 하지 못했다. 한마디로 망했다는 뜻이다. 구급상자가 파란색 블럭이기에 카메라 센서가 인식하는 파란색의 면적이 일정 이상 커졌을 때, 프로그램은 라인트레이싱을 중단하고 집게를 펴서 잡는 프로그램을 짰었는데, 시도때도 없이 파란색을 인식하도록 변수를 잘못 설정해서 라인트레이싱도 제대로 못하고 끝났다.
1차 라운드만 평가되었다면, 필자의 팀이 꼴찌였을 것이다. 가장 기본적인 라인트레이싱도 제대로 못하고 끝난 로봇은 우리팀 밖에 없었을 것이다. 카메라 센서도, 자이로 센서도, 그리고 라인트레이싱을 담당하는 컬러 센서도 잘 되지 않아 상황은 너무 절망적이었다. 기회는 세번 밖에 없는데, 그중 하나를 완벽하게 망쳤으니 수상은 벌써 물 건너 갔다는 생각이 뇌리를 스치기 시작했다. 하지만, 아직 기회는 두번 남았다는 희망을 가지고 다시 프로그램을 수정하기 시작했다.
자이로 센서를 이용해서 언덕을 인식해야 하는데, 연습 경기 때부터 가끔씩 자이로 센서의 값이 기하급수적으로 증가하는 오류가 났다. 그래서 필자는 그냥 언덕을 인식하는 프로그램을 빼버렸다. 그리고 90도 교차로를 인식 못하기에 라인트레이싱을 하는 모터의 파워를 낮추었다. 그렇게 시작된 2차 라운드에서는 다행히 엉뚱한 곳에서 파란색을 인식하는 사태가 벌어지지는 않았지만, 라인트레이싱을 평소처럼 잘하지 못했다. 그러나 결과는 평균 이상이었다. 이번에는 다른 팀들이 다 못해서 상대적으로 좋은 결과를 얻었던 것이다. 그리고 마지막 3차 라운드는 너무나 좋은 결과를 얻었다. 1차와 2차도 3차 라운드 만큼 했더라면 수상하지 않았을까 싶다.
그렇게 마무리된 대회에서 우리 팀은 안타깝지만 수상하지 못했다. 1차 라운드 때, 구급상자를(파란색 블럭) 인식하는 값을 잘못 설정해서 망친 것이 요인이었다. 원래 모형 앞에 구급상자가 있을 때에만 발동되어야 했던 프로그램이 엉뚱한 곳에서 게속 발동이 되니 라인트레이싱 자체도 잘되지 않았었다.
따라서 이번 대회의 패착은 바로 필자가 색상값을 제대로 프로그램하지 못했다는 것 이다. 카메라 센서가 구급상자와 안전지역만 제대로 보게끔 프로그램 했었더라면 결과는 달라졌을 것 같은데… 계속해서 이러한 아쉬움이 남는다. 그래도 마지막 3차전 때, 장애물 프로그램을 급하게 수정해야 하는 순간에서 바꾼 프로그램이 정말 잘 작동되었고, 라인트레이싱도 안정적으로 잘 작동되었기 때문에 아예 아쉬움만 남는 대회는 아니었던 것 같다. 이번 대회에서는 모형과 프로그램을 수정해야 하는 순간들이 정말 많이 찾아왔었는데, 그때마다 침착하게 수정했고, 또 그때마다 모형이 잘 작동했기에 이번 대회는 앞으로 필자의 기억 속에 오랫동안 남을 대회가 될 것 같다. 이번 Robocup South Korea Open 2023 대회에서는 예상치 못한 변수가 너무 많이 발생해서 수상을 받지는 못했지만, 이번 대회를 통해 배운 것들을 잘 갈무리 한다면 다음 대회는 더 성장한 모습으로 참여할 수 있을 것 같다.
|