|
젊은 로봇 공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
60번째 인터뷰는 생산기술연구원 강재현 박사다. 강 박사는 고려대학교 전기공학과를 2011년 2월 졸업하고, 2018년 8월 동 대학교 대학원에서 전기 및 컴퓨터공학으로 박사 학위를 받았다. 이후 2018년 9월부터 2019년 10월까지 1년여 간 고려대학교에서 연구교수를 거쳐, 2019년 10월부터 생산기술연구원에서 선임연구원으로 재직하고 있다.
2009년 9월부터 2011년 2월까지 고대교우회 장학생, 2011년 3부터 2013년 2월까지 브레인코리아 21 대학원연구장학생으로 선발되었으며, 2010년 11월 캠퍼스 특허전략 유니버시아드에서 3등상을 수상했다.
주요 연구 및 관심 분야는 로봇 인지, SLAM, Localization, Mapping, Sensor Calibration이다.
| |
 |
|
| ▲생산기술연구원 강재현 박사 |
Q. 최근 하고 계신 연구가 있다면 소개 부탁드립니다.
저는 로봇의 공간 인지 능력을 개발하는 연구를 하고 있습니다. 특히 로봇의 인식 기술 중에서 공간 안에서 로봇의 위치와 주변 공간을 동시에 추정하는 SLAM을 바탕으로 공간에 대한 이해를 다루는 문제를 해결하고 있습니다. 로봇의 공간에 대한 이해를 통해 공간 안에서 더욱 다양하고 복잡한 작업을 수행할 수 있게 만드는 것이 목표입니다.
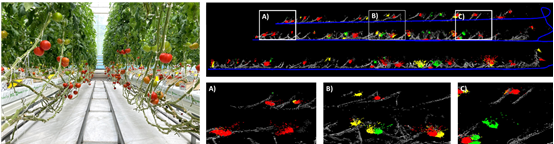
최근에는 SLAM 기술에 의미(semantic) 정보를 결합하여 로봇의 공간 인지 능력을 개발하는 방법을 연구하고 있습니다. 진행 중인 연구 중 하나는 농장 환경을 스캔하여 작물을 인식하고 전체 농장의 작물 위치, 크기, 상태를 파악하는 작물 지도를 만드는 것입니다. 이 기술로 작물 정보를 수집하여 전체 농장의 수확량을 예측하고 자동 수확 로봇을 위한 정보를 제공할 수 있습니다. 또한 자동 수확 로봇에 필요한 경로 계획 및 장애물 회피를 위한 정보도 제공할 수 있습니다.
| |
 |
|
| ▲농장 모니터링을 위한 작물 지도 생성 기술 |
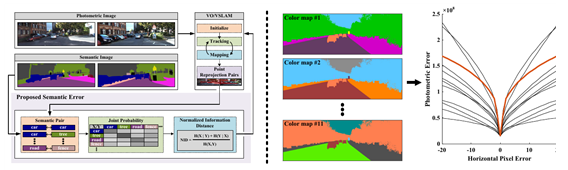
그리고 공간의 의미 정보를 비주얼(Visual) SLAM 시스템에 통합하는 방법에 대해 연구하고 있습니다. Visual SLAM에 의미 정보를 활용하려면 로봇의 위치와 환경 정보의 의미 기준 정합성을 수치화하고 최적화해야 합니다. 하지만 나무와 자동차가 얼마나 다른지 수치로 나타낼 수 없듯이 의미 정합성은 수치로 표현이 어려워 최적화하기가 어렵습니다. 이 문제를 해결하기 위해 의미 정보를 정보 이론(information theory) 관점에서 비교하고 의미 정합성을 정보량 차이로 수치화했습니다. 의미 정합성을 SLAM의 최적화 과정에 추가하는 것으로 기존 Visual SLAM의 성능을 개선하여 자율주행, 가상현실/증강현실(VR/AR) 등 SLAM 기반 기술의 성능 향상에 도움을 줄 수 있습니다.
| |
 |
|
| ▲정보 기반 의미 정합성을 사용한 Visual SLAM 기술 |
진행 중인 다른 연구는 공간의 대략적인 기하 정보만 알고 있을 때 영상을 사용하여 로봇의 위치를 찾는 기술입니다. 현재 연구에서 사용하는 공간의 기하 정보는 전체 공간을 벽, 천장, 바닥과 같이 주요 구조로만 표현하고 있습니다. 이러한 기하 정보는 사람이 쉽게 만들 수 있지만, 로봇 위치 인식에 활용할 수 있는 정보가 부족합니다. 특히 실제 공간에서 얻은 영상과 주어진 기하 정보가 리지드(rigid)하게 연동되지 않기 때문에 위치 인식 과정에서 논리지드(non-rigid)한 연동을 사용하는 최적화 기법을 개발하고 있습니다. 이 연구는 공간에 대한 단순 지도를 기준으로 로봇의 위치를 찾는 것 외에도 3D 공간 모델의 텍스쳐(texture) 생성 등 다양한 응용 분야에도 적용할 수 있을 것으로 기대하고 있습니다.
| |
 |
|
| ▲단순 기하 정보 내 영상 위치 인식 기술 |
Q. 고대에서 “Feature Based Multi-Modal Sensor Calibration for 3D Environment Scanning”으로 박사 학위를 받으셨는데 어떤 내용인지 소개 부탁 드립니다.
제가 박사 학위를 받은 연구는 로봇에 부착된 여러 센서 사이의 상대적인 위치와 방향을 찾는 캘리브레이션 기술입니다. 학위 당시에는 체커보드와 같은 특수한 타겟을 사용하는 캘리브레이션 기술이 많이 있었는데 개발한 알고리즘은 캘리브레이션을 위한 특수 타겟이 필요 없고 일반적인 환경에서 적용할 수 있는 장점이 있습니다.
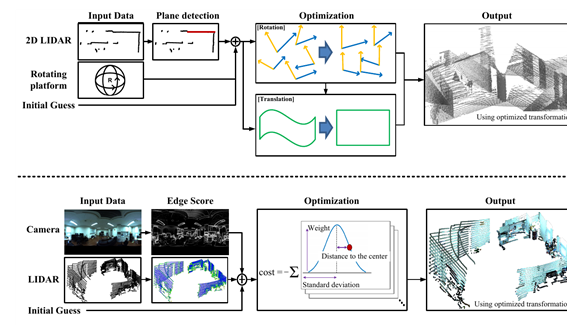
학위 논문은 두 연구로 나눌 수 있습니다. 하나는 공간의 평면성을 사용한 팬틸트(Pan-tilt) 회전 모듈과 라이다(LiDAR) 사이의 캘리브레이션입니다. 정확한 캘리브레이션을 위해 필요한 회전 모듈의 움직임에 대한 수학적 근거를 정리하여 IEEE Trans. on Robotics에 출판했습니다. 또 다른 연구는 공간의 경계선 정합성을 사용한 카메라와 LiDAR 사이의 캘리브레이션입니다. 경계선 정합성을 가우시안 혼힙모델(Gaussian Mixture Model)로 나타내는 해당 연구는 Journal of Field Robotics에 소개했습니다.
| |
 |
|
| ▲LiDAR-회전 모듈 (위) 및 LiDAR-카메라 (아래) 캘리브레이션 알고리즘 |
캘리브레이션 연구는 제가 지금 하는 로봇의 공간 인지 연구를 위해 필수적인 기술입니다. 센서 사이의 캘리브레이션이 이루어져야 로봇의 각 센서가 공간에 대해 취득한 데이터를 정확하게 연동할 수 있기 때문입니다. 앞서 말씀드린 것처럼 캘리브레이션 과정에서 타겟을 사용하지 않고 공간의 특성을 활용하였기 때문에 이 과정에서 얻은 기술들을 현재 공간 인지 연구에도 확장하여 사용하고 있습니다.
Q. 박사님의 주요 관심 분야가 로봇 인지, SLAM, Localization, Mapping, Sensor Calibration 분야로 알고 있습니다. 로봇 인지 분야의 최신 동향이나 특이사항이 있다면 무엇인지 궁금합니다.
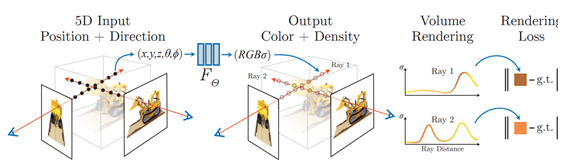
최근에 많은 관심을 받는 연구 중 하나는 NeRF(Neural Radiance Fields)입니다. NeRF는 공간의 시각적인 부분을 학습한 신경망으로, 학습한 공간의 임의 각도에서 바라보는 장면을 렌더링할 수 있습니다. NeRF의 특징 중 하나는 한 공간의 시각 정보를 하나의 신경망으로 인코딩했다는 것입니다. 이는 알렉스 켄달(Alex Kendall)이 포즈넷(PoseNet)에서 한 공간에 대한 위치 정보를 하나의 신경망으로 나타내는 것과 비슷합니다. 아직은 공간마다 새로 학습해야 하는 문제가 있지만 저는 공간의 정보를 신경망으로 인코딩하는 기술이 로봇의 공간 인지 분야의 발전에 많은 가능성을 가지고 있다고 생각합니다.
| |
 |
|
| ▲NeRF 개념도 (출처: “NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis,” ECCV, 2020.) |
Q. 로봇의 자율주행을 위한 핵심기술로 SLAM, Mapping 기술이 중요해 지고 있습니다. 자율주행시 이러한 기술이 왜 중요한지 설명 부탁 드립니다.
SLAM과 맵핑을 통해 주변 환경의 정보를 얻는 것은 주행 공간과 자율주행차량의 관계를 이해하기 위한 중요한 열쇠 중 하나입니다. 무엇보다 SLAM에서 로컬 단위 위치 추정을 위해 사용하는 센서 기반 주행거리측정(odometry) 기술이 유용합니다. 주행거리측정 추정 기술은 이동하는 차량의 자세를 추정하면서 실시간으로 주변 환경의 지도를 구축할 수 있기 때문에, 주행 중인 자율주행차량의 위치 추정, 환경 인식, 경로 생성, 제어에 활용할 수 있습니다. 또한, SLAM과 맵핑 기술은 자율주행차량이 주행하는 환경의 지도를 만들어 글로벌 정보를 생성할 수 있습니다. 이 지도를 활용하여 자율주행 기술은 경로 계획이나 장애물 회피와 같은 작업을 수행할 수 있습니다. 또한, SLAM은 GPS가 동작하지 않는 실내 주차장이나 터널에서의 주행을 도울 수도 있습니다.
Q. 로봇을 연구하시면서 가장 어려운 점은 무엇입니까?
로봇을 연구하면서 가장 어려운 점은 다양한 분야에 대한 경험과 지식이 필요하다는 것입니다. 로봇공학은 다양한 학문과 기술의 융합으로 이루어진 복잡한 분야입니다. 로봇을 연구하기 위해서는 수학, 컴퓨터 공학, 전기, 전자, 기계 등 다양한 분야의 지식과 기술이 필요하며, 인공지능과 데이터 기술 등의 최신 기술과도 밀접하게 연결되어 있습니다. 따라서 로봇을 연구하는 과정에서는 다양한 분야의 전문가들과 협력하고 소통하는 능력이 필수적이며, 새로운 기술 동향에도 민감하게 반응해야 합니다. 이러한 융합성을 갖추기 위해서는 꾸준한 학습과 연구가 필요하며, 이것이 로봇 연구에 있어서 가장 큰 도전이자 재미라고 할 수 있습니다.
Q. 로봇을 연구하시게 된 동기가 있다면?
로봇을 공부해 보고 싶다는 막연한 생각은 고등학교 때부터입니다. 그 당시 KBS 스펀지라는 프로그램에서 휴보를 다룬 적이 있는데 그 영향이었습니다. 학교에서 매번 하는 장래 희망 조사에 며칠 동안의 고민 끝에 로봇공학자라고 썼습니다. 한번 썼을 뿐인데 그때부터 로봇을 공부하고 싶은 생각이 머릿속에 자리 잡았습니다. 학부생 때 로봇에 관심 있다고 주위에 계속 말하고 다니다 보니 졸업쯤에는 로봇을 공부하는 것을 스스로 당연하게 받아들였습니다. 그래서 대학원 진학을 선택했고 로봇 연구를 시작하게 되었습니다.
Q. 2018년 8월 박사 학위 취득 후 9월부터 2019년 10월까지 1년여간 고대에서 연구교수로 계셨는데 당시 주로 어떤 연구를 하셨나요?
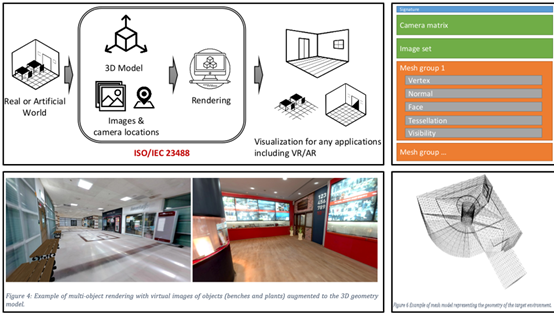
LiDAR SLAM의 결과로 얻은 포인트 클라우드 지도에서 카메라의 위치를 찾는 기술을 개발했습니다. 현재 진행 중인 공간의 단순 구조 모델 내에서 카메라의 위치를 인식하는 연구의 기반이 된 기술입니다. 다수 이미지를 포인트 클라우드와 연동하는 과정에서 텍스쳐의 정합성을 보존하기 위해 정규화된 정보 거리(Normalized Information Distance)를 사용하였는데 당시 개발한 알고리즘을 지금도 멀티모달 영상 정합과 의미 기반 에러 계산 등 여러 연구에 활용하고 있습니다. 그리고 영상 기반 렌더링(image-based rendering)으로 공간을 표현하는 방식에 대한 ISO 표준(ISO/IEC 23488)을 만드는 일도 했습니다.
| |
 |
|
| ▲상 기반 렌더링 기반 공간 표현 표준 (ISO/IEC 23488) |
Q. 로봇 연구자로서 앞으로의 꿈과 목표가 있다면?
‘로봇’ 연구자로서 목표는 로봇의 공간 인지 능력을 개발하여 로봇이 다양한 공간에서 사람에게 도움이 되게 만드는 것입니다. 그 과정에서 특정 공간에 제한되지 않고 여러 공간에 공통으로 적용할 수 있는 공간 지능을 개발하는 것이 목표입니다. 그리고 ‘연구자’로서 목표는 계속 배우고 익히는 것입니다. 새로운 이론과 기술을 배워 제가 가진 기술에 적용하고, 다른 연구자들과 협력하며 지식을 공유하고, 사회적 문제를 해결하는 데 기여하고 싶습니다.
Q. 선배로서 로봇공학자가 되려는 후배들에게 어떤 준비와 노력이 필요한지 조언해 주신다면?
각자 성향과 특성이 다르니 어떻게 말하기 어렵습니다. 과거의 저를 후배로 상정하고 말하자면 공부와 생각을 많이 하라고 말해주고 싶습니다. 파인만의 문제 풀이 알고리즘은 문제를 풀기 위해 문제를 쓰고 깊이 생각하고 답을 적으라고 합니다. 이게 무슨 말인가 싶고 사실 파인만이 이런 말을 했는지 출처도 없지만 이 말은 연구의 핵심을 담고 있습니다.
연구에서 문제가 풀리지 않는 경험은 불가피합니다. 아직 부족하지만 제 경험에 비추어보면 연구가 막히는 이유는 제가 알고 있는 지식이 부족하거나 그 지식을 활용하려는 생각이 부족한 것이 대부분이었습니다. 연구에 왕도는 없습니다. 많이 배우고 많이 생각하셔야 합니다. 그러면 새로운 지식과 생각으로 지금 마주하고 있는 문제를 다시 정의할 수도 있고, 문제에서 올바른 질문을 했다면 그에 대한 해결책을 찾을 수 있으리라 믿습니다.
Q. 연구자로서 국내 로봇산업이 한 단계 더 발전하기 위해 조언을 해 주신다면...
로봇의 다양한 응용과 혁신이 사회와 산업에 많은 변화를 가져오고 있습니다. 하지만 저는 아직 국내 로봇산업에 대해 조언할 정도로 충분히 잘 알지 못합니다. 제가 국내 로봇산업을 이야기하기 위해서는 더 많은 경험과 지식이 필요하다고 생각합니다. 좀 더 경험이 쌓이고 지혜가 생긴 후에 답변할 기회가 생기면 좋겠습니다.
| |
 |
|
| ▲도락주 교수님과 연구실 구성원 단체 사진 |
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 계시다면...
지금까지 많은 연구자분이 저에게 많은 영향을 주셨지만, 그중에서도 박사 과정 지도교수님이신 고려대학교 도락주 교수님에게서 가장 많은 영향을 받았습니다. 로봇을 공부하고 싶다는 마음만 있던 저를 진짜 로봇공학과 SLAM으로 이끌어 주셨습니다. 그 과정에서 도락주 교수님은 연구를 대하는 자세와 방법 등 연구자로 거듭나기 위해 필요한 많은 것들부터 때론 삶의 태도까지 많은 것을 알려주셨습니다.
| |
 |
|
| ▲도락주 교수님과 연구실 구성원 단체 사진 |
|
















