|
스위스 로잔연방공대(EPFL) 연구팀이 발톱처럼 생긴 메커니즘을 이용해 수평 횃대에 자율적으로 착륙할 수 있는 비행 로봇 기술을 개발했다고 19일(현지 시각) 밝혔다.
연구팀에 따르면 나뭇가지에 새가 내려앉는 '퍼칭(perching)'은 쉬운 동작 처럼 보이지만 착륙 타이밍, 충격의 정도, 속도, 정밀도 등 측면에서 극도로 섬세한 균형이 필요하다. 지금까지 어떤 날갯짓하는 로봇(ornithopter)도 마스터할 수 없을 정도로 복잡한 움직임이다.
EPFL 지능형 시스템연구소(Laboratory of Intelligent Systems) 박사후 연구원인 라파엘 주페리 등 연구진은 퍼칭 동작을 가능하게 해주는 독특한 착륙장치를 개발하고 연구 논문을 네이처 커뮤니케이션스에 발표했다.
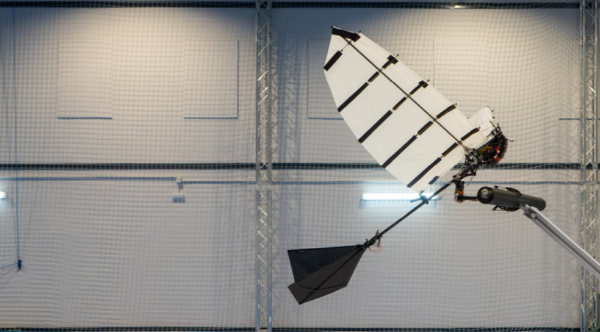
이 날갯짓하는 비행 로봇은 온보드 컴퓨터와 내비게이션 시스템을 탑재하고 있으며, 외부에 설치된 모션 캡처 시스템의 도움을 받아 자신의 위치를 결정할 수 있다. 로봇에 부착된 발톱은 횃대를 잡으려고 할 때 상하 진동을 보상하기 위해 정교하게 보정된다. 발톱은 충돌시 로봇의 전진 운동량을 흡수하고, 무게를 지탱하기 위해 빠르고 단단하게 닫히도록 설계됐다. 일단 횃대에 앉으면, 로봇은 에너지를 소비하지 않고 횃대 위에 남아 있게 된다.
| |
 |
|
| ▲ 발톱의 구조 |
주페리 연구원은 "날갯짓을 하는 로봇이 나무가지에 자율적으로 착륙할 수 있다면, 그것은 눈에 띄지 않게 나무로부터 생물학적 샘플이나 측정값을 수집하는 등 특정 작업을 수행할 수 있는 잠재력을 갖게 되는 것이다. 로봇은 심지어 인공구조물에 착륙할 수 있는 등 더 많은 영역에 적용될 수 있다“고 말했다.
그는 "비행 로봇의 퍼칭 능력은 태양 에너지를 사용해 동력을 충전받는 등 보다 효율적인 방법을 활용할 수 있도록 해준다. 잠재적으로 장거리 임무에 이상적이다"라고 덧붙였다.
연구팀은 모션 캡쳐 시스템을 설치해야 하기 때문에 로봇 비행 테스트를 실내에서만 수행했다. 연구팀은 ”앞으로 로봇의 자율성을 높여 예측 불가능한 야외 환경에서도 퍼칭 동작을 수행하고 조작 작업을 수행할 수 있도록 하고 싶다"고 말했다. |