UC버클리 ‘하이브리드 로보틱스 그룹’ 연구진은 사이먼 프레이저대, 조지아공대 등과 공동으로 강화학습 기반 로봇 골키퍼 기술을 개발했다고 테크엑스플로어가 지난 25일(현지 시각) 보도했다.
연구팀은 "4족 보행 로봇에게 축구를 가르침으로써 우리는 다리 로봇이 갖고 있는 인공지능의 한계를 넘어섰다“며, ”로봇이 빠르게 움직이는 공에 반응하고, 매우 짧은 시간(보통 1초 이내)에 역동적인 동작을 통해 공을 가로채야하는 흥미롭고 도전적인 작업을 수행했다. 이를 해결함으로써, 우리는 지능적이고 역동적인 다리를 갖고 있는 로봇을 만드는 방법에 대한 통찰력을 얻을 수 있었다"고 말했다.
이번 연구의 핵심적인 목표는 인간 골키퍼 처럼 기술을 완벽하게 수행할 수 있는 네 발 달린 로봇 골키퍼를 만드는 것이다. 이를 위해 연구팀은 여러번의 시행착오를 통해 로봇을 훈련시키는 강화학습 모델을 개발했다.
연구팀은 "로봇은 옆으로 걷기, 다이빙, 점프 등 특별한 기술을 습득하기 위해 다양한 이동제어 정책을 학습했다"면서, "이러한 제어정책을 바탕으로 로봇은 공의 위치와 로봇의 상태를 파악한 후 공을 가로채기 위해 최적의 기술과 동작을 선택하는 고난도 계획 정책을 학습할 수 있다"고 말했다.
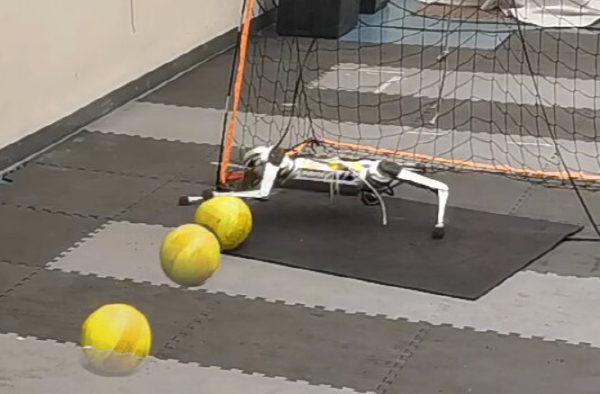
연구팀은 일련의 축구 경기 시뮬레이션 환경에서 강화학습 모델을 훈련시켰다. 이어 MIT의 4족보행 로봇인 미니치타에 학습한 정책을 적용했다. 실험 결과 연구진이 개발한 강화학습 프레임워크는 미니 치타 로봇이 축구 골키퍼로서 능력을 크게 향상시키는 데 도움을 준 것으로 나타났다. 이 로봇은 40개의 무작위 슈팅 가운데 87.5%의 성공률로 골대 안으로 들어오는 공을 막아냈다.