일본 '기타이', 자벌레 처럼 움직이는 로봇 팔 개발로봇 팔 양쪽 끝단에 엔드 이펙터 장착
승인 2022.08.18 15:15:34
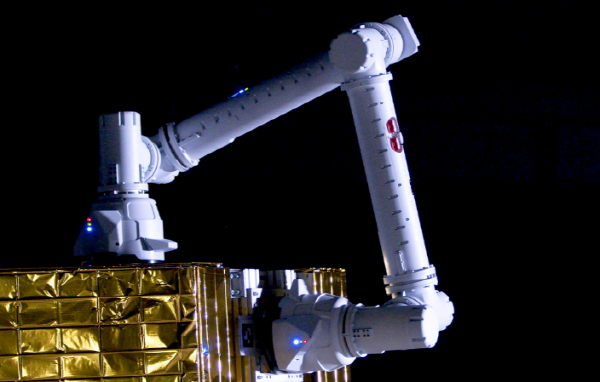
▲ 기타이 IN1 로봇팔(사진=기타이)
우주용 범용 작업 로봇을 개발하고 있는 일본 로봇 스타트업 기타이(GITAI)가 자벌레 처럼 유연하게 움직이는 로봇 팔 ‘기타이 IN1(Inchworm One)’을 개발하고 성능 시험을 성공적으로 마쳤다고 17일 밝혔다.
이 로봇 팔은 팔의 양쪽 끝 부분에 '그래플 엔드 이펙터(grapple end-effectors)'를 장착했다. 마치 자벌레가 움직이는 것처럼 로봇 팔의 양쪽 끝 부분을 이용해 이동하거나 작업을 수행할 수 있다. 이 로봇 팔은 인공위성이나 로버 등의 이동체 벽면에 설치된 '그래플 픽스처(grapple fixture)'와 끼워 맞추는 방식으로 이동체 위를 유연하게 움직인다. 이동하는 모습이 마치 자벌레를 닮았다. 그래플 엔드 이펙터는 1대의 로봇 팔에 다양한 엔드 이펙터나 툴을 결합할 수 있기 때문에 복수의 작업을 수행하는 데 적합하다.
기타이는 일본 우주항공연구개발기구(JAXA) 사가미하라에 위치한 달 시뮬레이션 환경에서 기타이 IN1과 달 탐사용 로버 '기타이 R1'을 연계해 NASA의 기술 성숙도 레벨(Technology readiness levels, TRL) 3에 해당하는 시험을 성공적으로 실시했다.
이번 실증 실험은 향후 달 탐사나 달 기지 건설에 필요한 작업을 상정해 이뤄졌다. 기타이 IN1과 기타이 R1을 사용해 복수의 작업을 수행할 수 있는 ‘작업(task) 성능’과 로버나 인공위성 등 이동체와 접속해 이동하면서 광범위한 작업을 수행할 수 있는 ‘이동 성능’을 동시에 검증하는 방식으로 진행됐다.
이동 성능 검증시험에선 기타이 IN1 로봇팔이 달 착륙선에서 로버로 자율적으로 이동하여 부여된 과업을 수행하고, 다시 달 착륙선으로 돌아오는 실험을 실시했다.
작업 성능 검증 시험에선 달 표면의 자원 채취 작업을 상정해 이뤄졌다. 절삭 공구를 사용한 자원 샘플의 파괴, 삽을 사용한 자원 샘플의 회수, 견인차를 사용한 자원 샘플의 운반 등 일련의 작업을 복수의 툴을 활용해 실시했다.