독일 DLR, '피펫' 정밀 조작하는 휴머노이드 로봇 기술 선봬7자유도 로봇팔과 5개의 손가락 이용해 고급 조작 실현
승인 2022.06.20 17:52:05
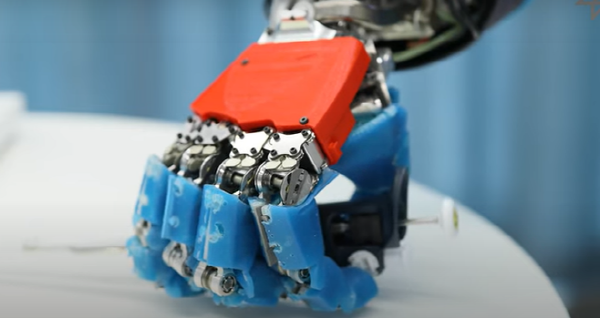
▲ 휴머노이드 로봇 데이비드가 손가락 조작 동작을 시연하고 있다.(사진=DLR)
독일 항공우주센터(DLR) 연구팀이 휴머노이드 로봇 데이비드(David, DLR Hand Arm System)가 7자유도 로봇팔과 5개 손가락을 이용해 '피펫(실험실에서 극소량의 액체 등을 재거나 옮기는 데 쓰는 작은 기구)'을 조작하는 고급 조작 기술을 시연했다고 밝혔다.
연구팀은 다중객체 추적과 고유 수용 측정 기술을 결합해 5개의 손가락을 갖고 있는 로봇 핸드의 고급 조작 기술을 선보였다. 로봇은 고급 조작을 위해 경로 계획과 함께 통제된 '손가락 내(in hand)' 조작 기술을 구현했다.
▲ 로봇 손가락으로 피펫을 움켜쥐는 모습
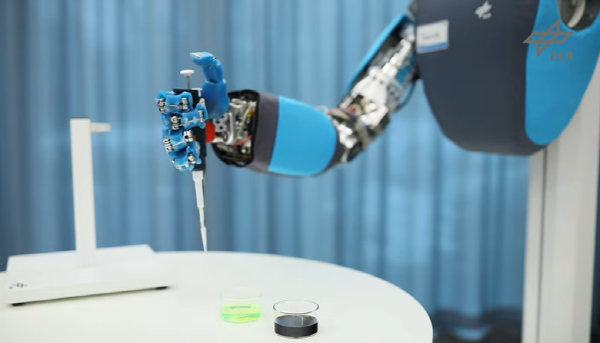
▲ 피펫을 이용해 용기의 액체를 흡입해 다른 용기에 떨어트리는 모습
한쪽 팔만 갖고 있는 휴머노이드 로봇 데이비드는 성인 크기이며, 몸무게는 26kg이다. 165개의 위치센서와 76개의 브러시리스 DC모터를 갖추고 있다. 높은 유연성을 제공하는 VSA(Variable Stiffness Actuators) 방식 관절을 갖고 있다. 데이비드는 지난 2010년 처음으로 공개됐으며, 이번에 고급 조작 기술의 구현을 통해 인간에 보다 가까운 유연성과 강건성을 갖게 됐다.
이번에 공개된 동영상을 보면 데이비드는 5개의 손가락을 갖고 있는 로봇 핸드를 이용해 피펫을 손안에 움켜쥐고, 한 용기에 있는 액체를 흡입해 다른 용기에 떨어트리는 동작을 수행했다. 마지막으로 피펫을 거치대에 걸어놓는다.