|
중국과학원 선전선진기술연구원 집성기술연구소 스마트바이오닉센터 팀이 마이크로 로봇 연구 분야에서 성과를 거뒀다고 1일 중국 언론 환치우왕(环球网)이 보도했다.
여러 마그네틱 구동 연체 마이크로 로봇을 동일한 자기장 하에서 독립적으로 제어하는 문제에 대해 해결책을 모색하고, 처음으로 4개의 마그네틱 연체 마이크로 로봇의 독립적 위치 제어와 3개 마그네틱 연체 마이크로 로봇의 독립적 경로 추적 제어를 실현했다. 이 연구 성과는 로봇 'IEEE 트랜잭션스 온 로보틱스(Transactions on Robotics)'에 게재됐다.
이 연구는 여러 마그네틱 구동 마이크로 로봇을 완전히 독립적으로 제어하기 위한 전략을 제안하며, 4개의 마이크로 로봇이 분리돼 서로 다른 목표 위치에 도달할 수 있도록 제어할 수 있다. 또 3개의 마이크로 로봇을 제어해 서로 다른 경로를 참고해 추적하도록 할 수 있다.
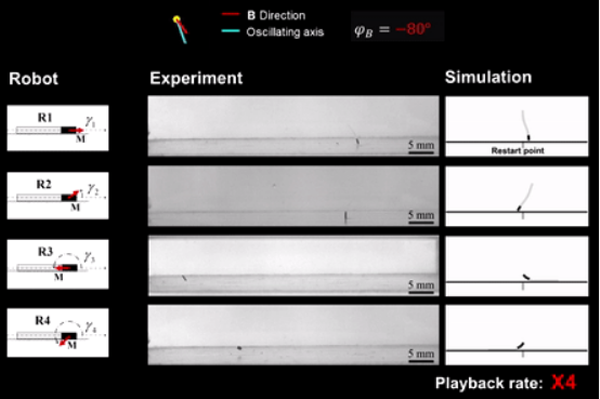
먼저 밀리미터 크기의 연체 마이크로 로봇을 설계했는데, 이 로봇은 외부 진동 자기장에 의해 구동될 수 있으며 평면상에서는 크롤링 동작을 할 수 있다.
다음으로 동일한 기하학적 구조를 가지지만 다른 자성 방향을 가진 이종 연체 마이크로 로봇을 설계했는데, 자성 방향이 다른 이들 연체 마이크로 로봇은 진동 자기장에 대해 속도 반응 곡선은 갖지만 위치는 다르다.
이후 이종 로봇의 속도 응답 모델을 기반으로 최적의 독립적 구동 제어 알고리즘을 설계했다. 마이크로 로봇 군단의 기대 속도에 따라 상응하는 최적의 구동 자기장 전략을 연산할 수 있으며, 선택된 로봇의 속도는 0이 아니며 나머지 로봇은 0에 가깝게 된다.
시뮬레이션과 실험을 거쳐 마그네틱 구동 마이크로 로봇의 분리된 독립적 제어 전략을 검증할 수 있다. 실험 결과 2~4개의 이종 연체 마이크로 로봇의 완전힌 독립 제어가 가능했으며, 로봇의 수가 증가하면 보행이 불안정하거나 속도문제가 생길 수 있지만 피드백 제어로 최적화할 수 있음을 보여줬다.
실험에서는 비전 기반의 서보 제어 방식을 채택했으며, 최대 4개의 마이크로 로봇의 위치 제어와 3개의 나노 로봇의 경로 추적 제어를 실현했고, 제어 오차는 몸 길이의 3분의 1 미만이였다. 팀은 독립적으로 제어할 수 있는 마이크로 로봇의 수를 늘릴 수 있는 방안을 모색하고 있다. (제휴=중국로봇망) |