|
뿌리업종 등 제조업의 표준공정모델 실증 보급 사업이 지난해에 이어 올해도 본격 추진된다.
한국생산기술연구원은 올해 18억원의 예산을 투자해 ‘2022년 제조로봇 선도보급 실증사업’을 뿌리(금속/플라스틱 분야) 업종을 중심으로 진행한다. 이미 개발된 표준공정모델(2021년 6개) 별 최대 5개 이내의 과제를 선정해 지원할 계획이다.
연구원은 또한 올해 12억1000만원의 예산을 투입해 ‘2022년 제조로봇 플러스 실증사업(R&D 연계형)’을 바이오 및 화학업종을 중심으로 진행한다. 이미 개발된 표준 공정모델(2021년 3개) 별 최대 5개 이내의 과제를 선정해 지원한다는 계획이다.
이들 사업은 이미 개발되어 있는 표준공정모델의 실증 보급을 통해 뿌리업종과 바이오·화학업종의 경쟁력 강화와 제조로봇 신시장 확대를 위해 추진하는 것이다.
고강도·고위험 작업의 대체, 인력난 해소 등 제조 환경개선을 위해 로봇 활용 확산이 필요한 뿌리업종과 바이오 및 화학업종에 로봇의 도입을 확대하겠다는 목표다. 이들 사업은 한국로봇산업진흥원이 전담기관이며 한국생산기술연구원이 관리기관이다.
지원 과제에 참여하려는 기업들은 주관기관(수요기업)과 참여기관(공급기관)이 컨소시엄을 구성해 참여해야 한다. 지원과제는 4월 중 최종 확정되며, 오는 11월말까지 과제가 본격 추진된다.
이번 실증 사업(지원과제)은 뿌리업종 표준공정모델 6개와 바이오 및 화학업종 표준공정모델 3개를 대상으로 이뤄진다. 로봇신문은 2022년 제조로봇 실증사업의 대상인 총 9개 표준공정모델에 대해 3회에 걸쳐 소개한다.(편집자)
게재 순서
1회 뿌리업종 표준공정모델(1)
2회 뿌리업종 표준공정모델(2)
3회 바이오 및 화학 업종 표준공정 모델
◇금속/자동차 부품-저항용접공정 대상 용접품질검사 공정
<개요>
용접공정을 통해 생산된 제품의 용접품질을 평가하는 품질검사 공정은 용접생산 제품의 건전성을 보증하는 필수불가결한 공정이다. 현재 국내 용접 생산라인을 가지는 수많은 기업들의 용접 품질검사 공정은 작업자의 육안 검사와 수작업에 의존해 용접품질 검사를 수행하고 있다.
이번 표준 공정 모델은 저항 용접의 일종인 너트 프로젝션 용접(nut projection welding) 품질검사 공정의 로봇 자동화 도입을 위해 개발한 모델이다. 작업자의 수작업에 의한 용접품질 검사는 작업자의 신체적/정신적 상태, 노하우 등의 감성적인 요인이 가미되어 객관적이고 체계적인 용접품질 검사와 관리에 한계가 존재한다. 작업자의 수작업에 의한 용접품질 검사공정의 한계를 극복하고 선진화된 용접생산 공정을 구축하기 위해서는 로봇 자동화 기반의 용접품질 검사 공정 모델 개발, 모델의 유효성 검증, 생산 공정으로의 적용 및 용접품질 검사 공정 도입이 필수적이다.
<현재 공정의 문제>
| |
 |
|
| ▲ 자동차 차제 부품의 너트 프로젝션 생산 전체 공정 흐름도 |
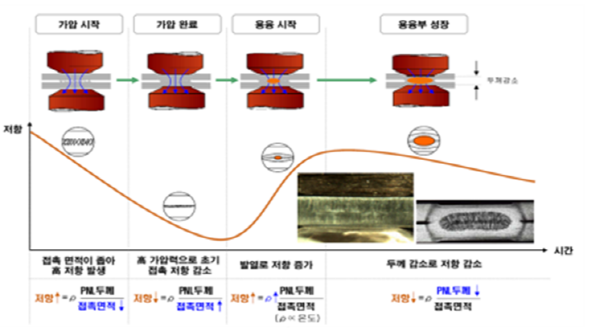
저항용접은 전극을 통해 압력을 가한 상태에서 높은 전류를 흘려주어 금속끼리의 접촉면에서 생기는 접촉저항과 금속의 고유저항 및 벌크저항(bulk resistance) 등에 의해 열에너지가 발생하고, 이로 인해 금속이 가열 또는 용융하면 가해진 압력에 의해 접합이 이루어지도록 하는 공법이다. 저항용점 품질검사는 파괴시험, 비파괴시험, 마이크로 그래픽 금속 시험, 용접부 외관 검사 등으로 분류할 수 있다.
| |
 |
|
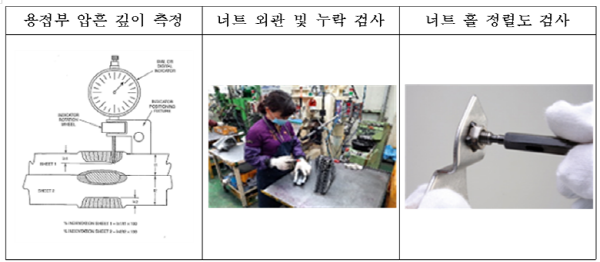
| ▲ 너트 와관 검사 과정 |
현재 국내 저항용접 제품 부품업체는 대부분 작업자 육안으로 제품 외관을 검사하는 형태로 용접품질 검사를 수행하고 있다. 육안 검사의 경우, 단순한 용접점 존재 유무, 용접부 외관 및 형상, 육안 검출이 가능할 정도의 과도한 외관 결함 등 단순 검사가 주를 이룬다.
대다수 너트 프로젝션 용접 생산 라인을 가진 기업의 경우, 용접이 완료된 부품의 용접품질 검사는 작업자 육안 검사를 통해서 이뤄지고 있다. 작업자의 수작업을 통한 품질검사는 단지 너트(하드웨어)가 용접되어야 할 위치에 용접되어 있는지 여부, 너트의 뒤집힘, 하드웨어 용접 유/무만 확인하는 상황이다. 작업자 육안 검사를 통해서는 정확하고 체계적인 검사가 불가능하다.
또한 피로도 누적으로 인해 수작업 중 용접 오류가 빈번하게 발생되어 부품 불량률이 증가시키는 원인이 되고 있다. 모든 공정이 수작업으로 이루어져 시간당 용접 부품 생산 수량이 일정하지 않고, 불량 발생에 대한 관리에 한계가 존재하기 때문에, 생산량 관리가 어럽다는 문제가 있다.
<로봇 활용 표준공정모델>
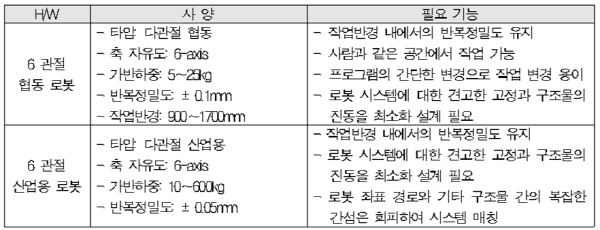
로봇 기반 저항용접 품질검사 공정은 현행 작업자 육안과 수작업에 의존하는 비파괴 검사 공정을 대체할 수 있는 비파괴검사 장비와 6축 산업용 로봇 및 협동로봇 조합을 통해 구축한 저항용접 품질 검사 시스템을 의미한다.
로봇 활용 저항용접 품질검사 공정은 원자재 입고→원자재 절단/성형→취부(로봇 도입)→용접(로봇 도입)→용접 품질 검사(로봇 도입)→적재(로봇 도입) 등 구성으로 진행된다. 가반하중 20kg 협동 로봇, 6축 다관절 산업용 로봇 등을 적용한다.
| |
 |
|
| ▲ 개선 방향 |
표준공정모델 도입으로 작업자의 육안 검사로 수행하지 못했던 용접부 정렬도 검사가 가능해지기 때문에 완성 부품의 정량적 품질 판단에 따른 불량률 감소 효과가 발생할 것으로 기대된다. 또한 모든 공정이 로봇에 의해 수행되어 생산시간이 일정해지고 이를 통해 시간당 용접부품의 생산수량이 일정하게 되어 생산량 관리가 용이해진다.
◇ 금속/자동차 부품-2D 비전 기반 머신텐딩 정밀가공 공정
<개요>
2D 비전 기반 머신텐딩 정밀가공 공정은 다축 다관절 로봇 기반 머신텐딩 공정에 2D 비전을 활용해 투입 소재 자동 선정 및 공급과 정밀가공 후 측정검사에서 나온 결과를 기반으로 수정가공을 진행하는 공정이다. 정밀가공 후 완성된 제품을 프로브 측정기, 머신 비전, 이큐에이터(Equator) 등을 이용해 측정검사가 진행된다.
로보비젼은 로봇에 비전 카메라를 연동하여 정렬 장치의 규격 또는 소재 위치를 파악하여 로봇이 로딩-언로딩을 하기 위한 사전 정보를 자동으로 수집 및 분석하여 투입 공정을 자동화하는 솔루션이다. 프로브는 가공 전 소재 검증과 가공 후 기상측정에 사용되는 측정기로 프로빙이라고도 하며, 공작 기계의 효율, 품질, 기능 및 정확도를 극대화할 수 있는 널리 인정받은 측정 방법이다.
이큐에이터는 3차원 측정기와 전용 게이지의 단점을 보완하고 장점만 모아서 만들어진 현장용 비교 측정기이다. 머신비전 시스템은 특수 광학 장치를 사용하여 산업용 카메라 내부에서 보호되는 디지털 센서를 사용하여 이미지를 수집한다. 컴퓨터 하드웨어 및 소프트웨어가 제품의 다양한 품질 특성을 평가하기 위해 디지털 이미지 정보를 처리하고 분석하는 기능을 제공한다.
<현재 공정의 문제>
| |
 |
|
| ▲ 기존 공정 구조 |
현 공정은 원자재 공급/세팅/검사 등 다수 작업자가 직접 공정을 진행하고 있어 상당한 피로 누적이 발생하고 중량물 이동으로 인한 작업자의 근골격계 질환을 유발하고 있다. 수동 세팅에 따른 품질 편차 발생문제도 있다. 단순 반복적인 소재 로딩-언로딩 작업 수행으로 인한 작업자의 집중도 저하에 따른 불량률 증가 및 세팅 때 작업자 기인성 오류 발생으로 인하여 품질 검사 애로사항이 발생하고 있다. 또한 1차 가공 완료 후 측정부서로 이동하여 측정을 진행하게 되며, 이동과정에서 리드 타임이 발생하고 이로 인하여 업무 로스가 발생한다.
<로봇 활용 표준공정모델>
| |
 |
|
| ▲ 협동 로봇 2D 비전 기반 머신텐딩 정밀가공 후 검사 공정 흐름도 |
로봇과 비전 카메라 도입을 통한 원자재 투입을 위한 소재 베이스 및 소재 선택 공정 자동화와 세팅/검사 공정 자동화를 통해 불량률을 최소화하고 작업자에게 쾌적한 작업 환경을 제공할 수 있는 시스템 개발이 필요하다.
로봇에 의한 일률적 작업을 통하여 세팅 불량을 방지하는 시스템 개발이 필요하며, 협동 로봇의 자동화 공정 도입으로 제품 생산시간 단축을 통하여 생산성 향상 및 산업재해 발생률을 저하할 수 있는 시스템 개발이 요구된다.
| |
 |
|
| ▲ 시스템 구성안 |
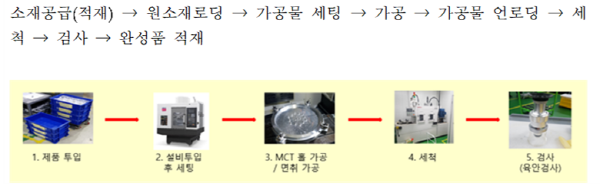
표준 공정 모델 시스템 구성은 6관절 협동 로봇과 산업용 로봇 등으로 구성되며 전체 공정은 소재 적재→ 2D 비전 활용 소재 검사 및 인지 → 세척 → 가공 설비 소재 세팅 → 가공 → 세척 → 가공 후 검사 → OK 제품 적재 및 NG 제품 수정가공 등 순으로 이뤄진다.
표준공정 모델 도입으로 정형화된 반복 작업을 로봇이 대신 수행하여 현장 작업인력의 피로도 감소로 인한 생산성 향상, 근로환경 개선율 향상을 기대할 수 있다. 또한 가공품에 대한 즉각적인 측정으로, 불량 원인에 대한 추적관리가 가능해져 공정 불량률이 감소하고 로봇 투입공정으로 공정 필수인원의 타 공정 재배치가 가능하여 인건비 감소를 통한 생산원가 절감이 가능해진다.
◇금속/플라스틱 부품-도금랙 로딩/언로딩 공정
<개요>
도금 공정은 금속 이온이 용해되어 있는 도금 용액 내에 시편(환원전극)과 양극(산화전극)을 침적시키고 일정 수준 이상의 과전위를 인가함으로써 시편 표면에 전기화학적 환원 반응을 유발시켜 금속 및 비금속 코팅층을 형성하는 기술이다. 소재·부품 표면에 내식성·경도·내마모성 같은 기능을 부여하거나 외관을 미려하게 만들어 최종 제품의 부가가치를 향상시킨다.
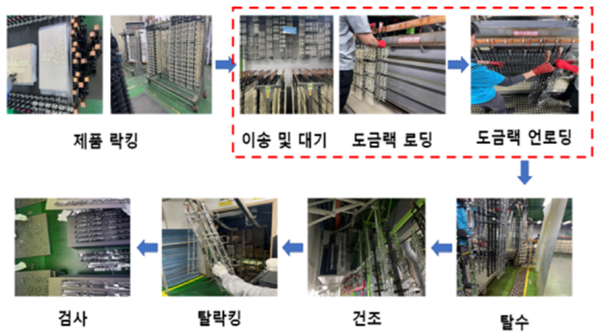
도금랙 로딩/언로딩 공정은 자동차 부품, 사출 부품 수요 증가로 인하여 지속적인 수주가 이뤄지고 있다. 생산량 증대 및 생산량 확보가 필요하지만 현실적으로 작업자 수급에 한계가 노출되고 있다. 표준공정 모델 도입으로 자동차 엠블럼 사출이후 도금공정에 작업자가 직접 수작업으로 도금랙을 대차장비에 거치하여 로딩/언로딩 하는 공정을 자동화하여 업무 효율을 극대화할 수 있다.
<현재 공정의 문제>
| |
 |
|
| ▲ 자동차 엠블럼 도금라인 전체 공정 흐름도 |
현재 공정은 작업자가 대차로부터 이동대차로 5~10kg의 도금랙을 수동으로 운반 및 거치 등 단순 반복작업을 장시간 수행할 경우 집중력 저하 및 근골격계 질환 발생 등 작업자의 작업수행능력 저하로 인해 안전 사고 발생 우려가 높다. 또한 도금생산라인 특성상 유해 화학성분에 노출되기 쉬운 환경으로 작업자가 장시간 수동작업으로 도금랙 로딩/언로딩 진행시 인체유해 화학물질에 노출될 위험이 발생하고 있다.
<로봇 활용 표준공정모델>
| |
 |
|
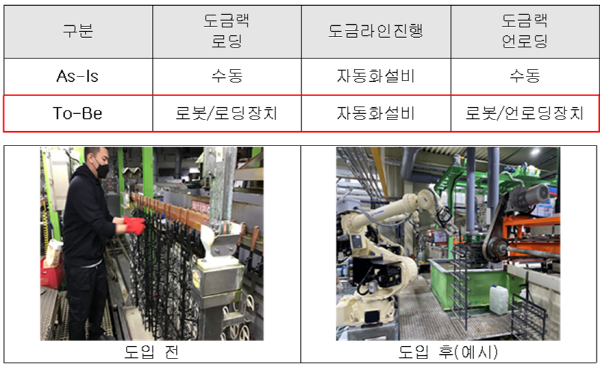
| ▲ 개선 방향 |
도금랙 로딩/언로딩 작업수행에 이재 로봇을 구축함으로써 작업자 수동작업 진행시 발생할 수 있는 안전사고 및 유해화학물질 노출을 방지하여 작업자의 작업만족도 향상을 통한 작업효율을 극대화시킬 수 있는 시스템 개발이 필요하다.
| |
 |
|
| ▲ 시스템 구성안 |
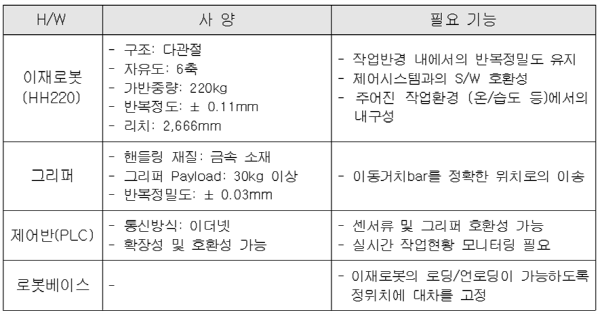
로봇 활용 표준공정 모델 시스템 구성은 다관절 이재 로봇, 그리퍼, 로봇 제어반, PLC, 로봇 베이스 등으로 구성된다. △ 작업자가 대차를 로봇베이스(대차 정위치고정)로 이동 △ 도금랙 이재로봇이 이동거치바(bar)를 이동대차로 로딩 △자동화설비 도금라인 작업진행 △ 도금이 완료된 도금랙을 이재로봇이 이동대차에서 대차로 언로딩 △ 작업자가 이후 공정 진행(탈수 및 건조) 등 절차를 거친다.
표준 공정 모델 적용후 작업자와 위험현장의 분리에 따른 안전성 확보, 이재 로봇을 통한 이동/적재 관리를 통한 프로세스 단순화, 이재 로봇이 인력을 대체함으로써 인력 활용도 증가 등 효과를 기대할 수 있다. |