美 노스캐롤라이나주립대, 종이접기 기술 활용해 달걀 노른자도 집는 그리퍼 개발2D 재료로 평행 슬릿 모양 패턴 결정···정밀함 살린 채 섬세한 물체 옮겨
승인 2022.02.02 10:44:23
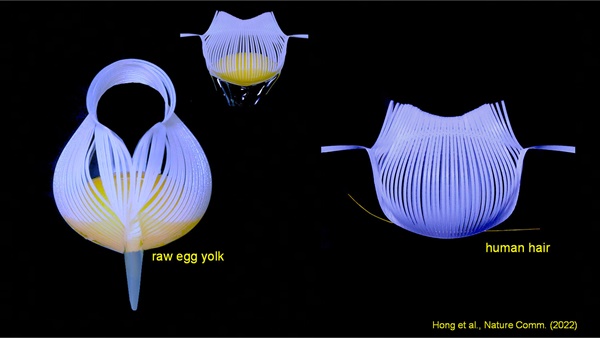
▲미국 노스캐롤라이나주립대(NCSU) 공학 연구원들은 섬세한 계란 노른자를 터트리지 않은 채 옮기고, 사람의 머리카락까지도 들어올릴 정도로 정확성을 갖는 새로운 유형의 유연한 로봇 그리퍼를 시연했다. (사진=NCSU)
미국 노스캐롤라이나주립대(NCSU) 엔지니어들이 섬세한 계란 노른자를 터트리지 않고 옮기며, 사람의 머리카락도 들어 올릴 정도로 정밀성까지 갖춘 새로운 유형의 유연한 로봇 그리퍼를 시연했다. 이 작업은 소프트 로봇 및 바이오 메디컬 기술에 모두 적용될 수 있다.
이 작업은 종이같은 2차원(2D) 재료를 자르고 접어서 3차원(3D) 모양을 만드는 이른 바 ‘키리가미(kirigami)’ 기술을 활용한다.
특히 연구원들은 대부분의 재료를 평행 슬릿(slits)으로 자름으로써 2D 종이들을 3D 곡면 구조로 변환하는 키리가미 기술을 포함하는 새로운 기술을 개발했다.
이 3D 구조의 최종 형태는 대부분 집으려는 재료의 외부 경계에 의해 결정된다. 예를 들어 원형의 경계를 가진 2D 재료는 구형의 3D 형태를 형성하게 된다.
논문 제1 저자인 이 대학 야오예홍 박사과정생은 “우리는 사용자들이 거꾸로 일할 수 있는 모델을 정의하고 시연했다. 사용자들이 어떤 곡면의 3D 구조가 필요한지 알고 있다면, 그들은 우리의 접근 방식을 통해 2D 재료에 사용할 슬릿의 경계 모양과 패턴을 결정할 수 있다. 그리고 그 재료가 밀리거나 당겨지는 방향을 조절해 최종 구조물을 추가로 제어할 수 있다”고 설명했다,
이 논문의 교신 저자이자 NCSU 기계항공 공학부 부교수인 지에인 교수는 “우리의 기술은 지금까지 2D 재료를 곡면 3D 구조로 변환하던 기술보다 상당히 간단하며 디자이너들이 2D 재료로부터 다양한 맞춤형 구조를 만들 수 있게 해 준다”고 말했다.
연구진은 달걀 노른자에서부터 사람의 머리카락까지 물체를 잡고 들어올릴 수 있는 그리퍼(집게)를 만들어 이 기술의 유용성을 입증했다.
인 교수는 “우리는 우리의 기술이 심지어 극도로 취약한 물체를 잡고 움직일 수 있는 도구를 만드는 데 사용될 수 있다는 것을 보여주었다”고 덧붙였다.
그는 “전통적인 그리퍼들은 물체를 단단히 잡는다. 그들은 압력을 가함으로써 물건을 잡는다. 그것은 계란 노른자와 같은 깨지기 쉬운 물건을 움켜쥐려고 할 때 문제를 일으킬 수 있다. 그러나 우리의 그리퍼는 본질적으로 물체를 둘러싸고 그것을 들어 올린다. 우리가 물체를 감싸는 것과 비슷하다. 이것은 우리가 정밀함을 희생하지 않고 섬세한 물체조차도 ‘그립’하고 움직일 수 있게 해 준다”고 설명했다.
그러나 연구원들은 이 기술을 사용해 인간의 무릎과 같은 관절 형태에 맞는 생체 의학 기술 설계 등 많은 잠재적 응용 분야가 있다는 데 주목한다.
인 교수는 “무릎이나 팔꿈치로 구부리고 움직일 수 있는 스마트 붕대나 모니터링 장치를 생각해 보라”고 말한다.
그는 “이것은 우리의 기술력을 보여주는 개념 증명 작업이다. 우리는 현재 이 기술을 소프트 로봇에 통합해 산업계의 문제를 해결하는 과정에 있다. 우리는 또한 이 기술을 사용해 어떻게 인간의 무릎에 온기를 가하는 치료 장치를 만들 수 있는지 탐구 중이다. 우리는 추가 응용분야를 찾기 위해 기꺼이 업계 파트너와 협력하고 이 연구소 차원 접근 방식을 실제 사용할 수 있도록 하는 방법을 찾을 것이다”라고 말했다.
이 논문은 ‘경계 곡률로 유도된 프로그램 가능한 형상 변형 키리가미 시트’라는 제목으로 1월 26일자 네이처 커뮤니케이션 저널에 게재됐다.