|
��ܹ��� �ѱ�����ũ���Ƿ�κ�������(Korea Institute of Medical Microrobotics : KIMIRo)�� 2019�� 1�� ��������������� �����Ǿ���. KIMIRo�� �Ѹ��� �����Դ� 2016�� ������� ����ũ���Ƿ�κ�����, �ָ��� 2008�� ������ ������ �κ�������(RRI)��� �� �� �ִ�.
�� �߽ɿ��� ����ũ���Ƿ�κ��� ���ٸ� ������ ���� ������ ������ �ڸ���� �ִ�. �� ������ KIST ���������� 18�Ⱓ �����ϴ� 2005�� 2������ ������ ���� ������ �����ϸ鼭 2008�� �κ������Ҹ� ������ ������ �����ϰ�, 2013�� ����� ������ ����ũ���Ƿ�κ����� ������� ��ġ�ϸ鼭 6�Ⱓ �������� ���� 2019�� 1������ KIMIRo �ʴ� ������ �þ� 3��° �̲������ �ִ�. ���� 2�� 16�Ⱓ �����ߴ� ������ �����к� ������ ���������ϸ鼭 KIMIRo ���� �������� �����ϰ� �ִ�.
�ѱ�����ũ���Ƿ�κ�������(KIMIRo) ������ ������ ���� 8�� 18�� ���ֱ����� �ϱ� ÷�ܰ���ο� �ִ� ����ǿ��� ���� ������ ���� �̾߱�� ������ �Ұ�, �������� �̷� ���� ����ũ���Ƿ�κ��� ���� �̾߱⸦ ��� �ô�.
| |
 |
|
| �� ������ �ѱ�����ũ���Ƿ�κ����������� ���� 8�� 18�� �κ��Ź��� ���ͺ� �ϰ� �ִ�. ����=���Գ� �������� |
20�� �Ѱ� ����ũ���Ƿ�κ� ������ �����ϴ�.
����ũ���Ƿ�κ��� ���� ������ �� ������ KIST���� ���������� �ִ� 1999�� ���б���� 21���� ����Ƽ�� �������� ���α� �� �ϳ��� '������ ����ũ�νý��� ���α�' ���߿� ������ ������ �ϸ鼭 ���۵Ǿ���. �� ���� ������� ���� ������ ���峻�ð� �κ�(2005�� ���ȭ), ���� �� ��°�� ������ ĸ�����ð�(2005�� ���ȭ)'�̴�. �̷��� ������ �������� 2010����� ������ �κ������ҿ� ����ũ���Ƿ�κ����� �߽����� ���� ���� ����ġ��� ����ũ�ηκ� ��ü �������� ����, 2013�� ���� ���� �������� ��ü �������� ����, 2016�� �鿪���� ����ũ�ηκ� ��ü �������� ����, 2017�� ���� ���� �ٱ⼼�� ����ũ�ηκ� ��� ���� ���� ������ �������� �̷�鼭 ���ѹα� ���ִ� ���� �ְ��� ����ũ���Ƿ�κ��� �ٽ� �������� �����ߴ�. �� �ù����� 2013����� 6�Ⱓ 50����� ������ 317��� �Ը��� ‘����ũ���Ƿ�κ����� ����’ ��å����� �������� ����ȭ�Ǿ��ٰ� �� �� �ִ�. ����ũ���Ƿ�κ� �о� ���� �ִ� Ư�� ���(��� 308��, ��� 208��) ��ϰ� ��� ��������� ���� �ξ�Ƽ ���Ը��� ���ʾ���� �̸���. �پ��� ����� ���������� �����ϰ� �ؿ� Ư���庮 ����, ����ǰ ��÷� ���� ������ �����ϰڴٴ� ��ǥ��.
| |
 |
|
| �� ���ֱ����� �ϱ� ÷�ܰ���ο� ��ġ�� �ѱ�����ũ���Ƿ�κ������� ��� |
����ũ���Ƿ�κ� �о� �۷ι� ������ ����, ��ǥ
KIMIRo�� ����ũ���Ƿ�κ� �о߿��� �۷ι� ������ �Ǵ� �� �����̰� ��ǥ��. ����ũ���Ƿ�κ��оߴ� ���� �ʱ� �о����� ���踦 �ֵ��� �� �ִ� �������� ����� ���� �ı�ȿ���� �ſ� ū ����̴�. �츮����� ������ ����ũ���Ƿ�κ� �о� ������ �پ��� ������ ���踦 �����ϴ� ���� �쿡 ���ԵǾ� �ִ�.
���ֱ����� �ϱ� ÷�ܰ���ο� �� ��� �ִ� KIMIRo�� ����ũ���Ƿ�κ� ��������, �ӻ� GMP��� ��� ����ǰ ���� �� �������迡 ���� ��ȿ�� ��, ����ũ���Ƿ�κ��о� ���п����� ������ �������� ������ �����ϰ� �ִ�.
���� ������ ��������ʹ� 5970�� �Ը�� ������ �������� �����Ǿ� �ִ�. �������� ����ũ���Ƿ�κ� ������Ÿ�� ������, ��������, X�� ����ǰ� 6�� ����� ������ �ִ�. �������� ������̿��κ� Ŭ����� ���̿�·���������, ��������� ���� �ִ�. ����ũ���Ƿ�κ� ������� 77���� ���߰� ���� ���̸�, 3D ������ ��ǰ �������, ������ ���̰� � ����Ǿ� �ִ�.
| |
 |
|
| �� ����÷�ܰ��л�������� �Ǹ��� ����ũ���Ƿ�κ� ������������ ������ |
���� ��������Ϳ��� 3~4Km ��ó�� ������ �Ǽ����� �����������ʹ� 8800�� �Ը�� �ӻ� GMP ����ǰ ���۰� �ü��� ���� �����̴�. ����ũ�γ��������� 1,2�� �Ǿ�ǰ ���� ó����, ��ȿ�� �ü�, ����/�� ���� �ü�, ��� ��Ʈ��ũ ���� ���� ����. �ӻ� GMP ���� ���� ���, GMP ��ó�� ��� 12��, ��ȿ�� ������ ���� �� ���� ��� �� �ӻ�� GMP �ü����� ���� ��� 100�� �� �ְ��� �ü��� ������ �����̴�.
���� �ְ��� ����ũ���Ƿ�κ� ���� �ü� ����
������� �� ���迡 ����ũ���Ƿ�κ� �о߿��� �� ���� �ü��� �η�, �Ը� ���� ���� ����. 2024�� �����������ͱ��� ������ �Ǹ� ���� �ְ��� ����ũ���Ƿ�κ� ������� ��Ҽ� �� �ִ�. ���� �����ö�ũ������ ���ڸ���Ʈ �ý��� �������� �ִ� ����ũ���Ƿ�κ� �о� �밡�� ‘��ƾ ��Ƽ(Metin Sitti)’ ���� ���� KIMIRo�� �湮�ϰ� ���� �� �Ը�� �ü��� ����ٰ� �Ѵ�. ����ũ���Ƿ�κ� �о߿��� �� ������ Ŭ������ ���� ���� KIMIRo�� �����ϴ�.
KIMIRo�� 2019�� 1�� ��ܹ��� ������ ���������� �����Ǿ����� ��å ��������� �ƴϾ �ܺ� ������ �����ؾ߸� ��� ������ ������. ������ 2019����� ���� ���� ���������� �մ� �����ϸ鼭 KIMIRo�� ���� ����ũ���Ƿ�κ� R&D �������� Ȯ���� �ڸ��ű� �ߴ�. 2019�� 6�� ���Ǻ����� ‘����ũ�� �Ƿ�κ� �ǿ�ȭ��������’ ������ ������ �ѻ���� 407���(���� 388���, �ú� 19���)�� ������ ���� ��������, 2020�� 5������ ‘����ũ���Ƿ�κ� ������������ ����’ ����� �����Ǹ鼭 2024����� ���� 182����� ������ �� 309����� ����� �����´�. �� ���� ����ó������� 1� 29� 5�Ⱓ 145����� ���ԵǴ� ����� �����ߴ�. �̷��� ���� ����� �����ϱ� ���ؼ��� ó������ ���� ��ȹ, ���� Ȯ��, ġ���� ���� ������ ���ľ� �� ���� ����� ���� �Ѵ�.
| |
 |
|
| �� �ѱ�����ũ���Ƿ�κ������� ��ü���� |
R&D���� 6�� ���� ���ȭ���� �߽����� 65�� �ٹ�
KIMIRo�� ������ �������� R&D���ο� ���ȭ���� ���� �����濵��, �コ�ɾ�������, ������º��ΰ� ������ ���� �� 65���� ���������� �ٹ��ϰ� �ִ�. ���, ����, ����, ȭ��, ����, ���� �� �پ��� �о��� ���������� �����Ǿ� �ִٴ� �͵� ū �����̴�.
�������� �ٽ��� R&D���ο��� ���̿����� ��, ������̿����� ��, ����Ʈ�κ�ƽ�� ��, ���� AI ��, ���� ���߿����� ��, �κ����ø����̼� �� �� 6���� ���� �ְ� ������ ���� ������ ���� �����鼭 ������ �κ������� �����̱ �� ��Ư�� ������ ���� �ִ�. ���� �����ȣ�� �����Ҹ� ��ġ��ŷ�ߴµ�, �� ������ ���� �����ȣ�ۿ����� ���������� ���ߴ� ������ ��� ������ �����ߴ�. ������ ���� �� ���� 3�Ⱓ ���� ����� �������̾��ٴ� ���� �� ������ ��.
6���� ���� ���� � �ϵ��� �ϰ� �ְ�, ������ �ϸ鼭 � �������� ������.
| |
 |
|
| �� ���̿����� ���� �ð� �ִ� ����ǥ ���� |
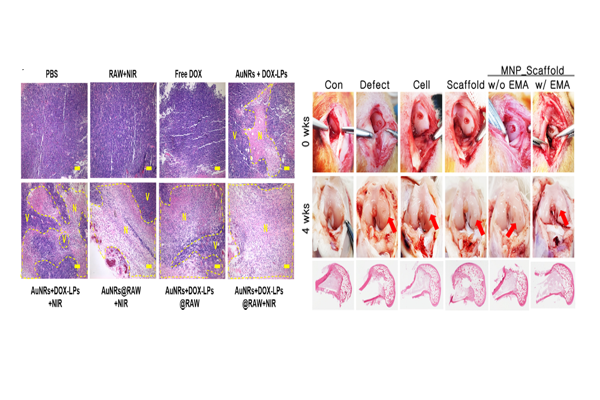
���̿����� ��(Bio medical Lab)�� ����ǥ ������ å���ڷ� �ִ�. ���̿� ���� ������ 5���� �����ڰ� ����ũ�� �κ��� ���� ��ȿ�� �� �����Ѵ�. ����ũ��/����κ� ������ �ʿ��� �������Ǿ����� ���� ������ ����� ���� ���� ���ݿ� ��ģ ���� ��� �����ϰ� �ִ�. ������, �鿪��, ���� ���ڻ� ������ �������� �������� ������ ���� ÷�� �Ƿ� ����ũ��/����κ� ���߿� �ַ��ϰ� �ִ�. �ֿ� ������ �پ��� ���� ��� �Ƿ�� ����ũ��/����κ��� �����ϰ� �Ϲ� �Ƿ�� ����ũ��/����κ��� ü��/�� ��ȯ ���� Ȯ��, ������ �����ϰ� �ִ�. ��, ������ ��ü ������μ� ���� �۵� �鿪���� ��� ����ũ�ηκ� ����, ���� ����� ���� �ɵ� �۵� �ٱ⼼�� ��� ����ũ�ηκ� ����, ������ ��� ����κ� ���� ���� ���� �̽��� ������ �ִ�.
�� ������ �����뿡�� �ڻ縦 ��ġ�� �̱� �����ϴ뿡�� �ڻ��� ���������� �ٹ��ϴ� 2017�� ������ ������ �����ߴ�. ������ �������� ���̿� �⽺(Bio Mems)�� �̼���üĨ(microfluidic chip)’�� ����� �� �ȿ��� ������ �ŵ��̳� �������� �����ϴ� Ĩ�� �����, � ���� �� Ĩ�� ����� �۾��� �ַ� �ߴ�.
| |
 |
|
| �� �����м��� ���� ġ��ȿ�� ���� ��� |
�� �������� �����ϸ鼭 ���� ����� ���� ���� �����̴�. ���� ������ ������ �ٷ�� ���� ���и� �ּ�ȭ�ؾ߸� �Ѵ�. �ݺ� ������ �ϴ� ���� ������ ���� ���̰� �ȴ�. �ٸ� ���� �ι������� ������ ����� �� �� ��������� ���� �� �ͼ� �� ���� �� ������, ���� ����ǿ����� �غ� �������� ���� ��ȹ�� ����, ��ü ���� ���ϴ� �غ� �������� �����ϴ�. Ȥ�� �� �߸��ƴٵ��� ����ü�� �߸� ��������� ������ �ٽ� �ؾ� �Ǵµ� ���� ���� �ð��� ���� �þ�� �ȴ�. �ϳ��� ������ �Ѵٰ� �������� �� ��ü���� �Ⱓ�� 1������ ���� �� 8���� ������ ���� ������ ������ ��ŭ �ð��� ���� �ɸ��� �۾��̴�. ���� ��ȯ �� ����� �۾��� ���� �۾��̴�. � ����ũ�� ����ü(Scaffold)�� ���� ��� �� ���� ������ �װ��� ������ �㸦 ���� ���� ��⸦ ��� ���� ��⺰�� � ������ �ִ��� �ľ��ؾ� �Ѵ�. �� ������ �� ���� ����ۿ� �� �� ����. ����ü�� ��� ���� ������ �ؾ� �Ǵµ� �� ���� �� �㰡 �ټ� ������ �ʿ��ϸ� ����ü�� �ټ� �� ������ٰ� �����ϸ� 25������ ����Ǿ�� �Ѵ�. ����ũ�� �κ��� ��� ������ �̷�� ������ ��� ���� �ð��� �������� ���� ������ �� ��ʰ� ������ �ʴ�. �а迡���� �������迡�� ��ȿ���� �� �Ǿ�߸� ������ ���� �� �ִ�.
2019� ����κ��� �����߰�, �ٱ⼼����� �κ� ��������, �ΰ� ����, ��ȯ�� ������ ���� ���� ���� �Ͽ���. ������ �κ� ������ �ϰ� �ֱ� ������ �����ƿ� ���� ���� �м��� ���ϱ� ���ؼ��� �������� �������� ������ ��� ��� ������ ������ ���Ѿ� �Ǵ����� �����ϰ� �ִ�.
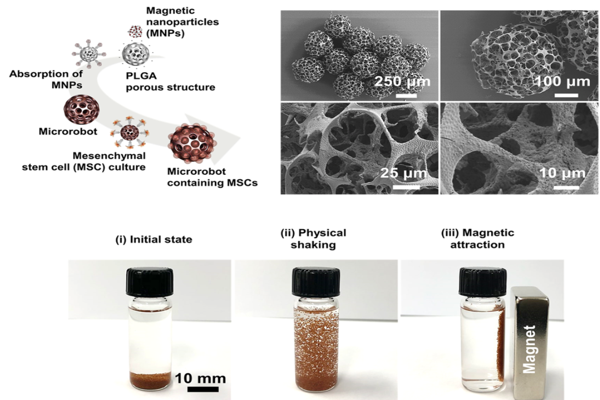
������̿� ���� ��(Nanobio Materials Lab) ���� ����ǥ ������ å���� �ð� �ְ� �������� ����Ʈ�κ�ƽ�� �� �浵�� ������ �����ϰ� �ִ�. 7���� ���������� �ִ� ������̿� ��Ƽ������ ���� ����Ʈ �κ�ƽ�� ���� ���� �����ϰ� �ִ�. ���� ���̿� �������� ���� ��ǥ�� �Ƿ�� ����ũ�ηκ� ������ ���� ������/�����ռ� ���縦 �����ϴ� �� �ִ�. ����� �ڱ��� Ư���� ���� ���縦 �����Ͽ� ����ũ���Ƿ�κ��� ��ü ������ ��������� �̵� �� ����/ġ��/���� ���� �����Ͽ�, ���� � ���� �ý����̳� ī���� ��� ������ �Ѱ����� �غ��Ѵ�. ���� � ���� �ý����� ���ϴ� ��ġ���� � �ε��� ���ü �Ǵ� ���� ������ �ɵ��� ������ ��ư�, ī������ ������ Ȥ�� ������ ���� ������ ��ƴ�. ����, ����ũ���Ƿ�κ��� �ڰ���� ���� ������ ���� ���� ������ ���ϴ� ��ġ�� �ɵ������� �̵��� �� �ֵ��� �����ϸ�, ����, �̹�¡, � �Ǵ� ���� ���� �� ���� ������ ���� �߰� ����� �ο��Ͽ� ���� �Ƿ� �ü��� �Ѱ����� �ذ��ϴ°� ��ǥ��.
| |
 |
|
| |
�ֿ� ���� �оߴ� ����ũ�� �Ƿ�κ� ������ ���� �����ռ� �� �����ؼ� ���� ����, ����ũ�� �Ƿ�κ����� � �Ǵ� ���� �ε��� ���� ����ũ�� / ���� ���� ����, ����ũ�� �Ƿ�κ��� ���ο� ��ɼ��� �ο��ϱ� ���� ���ο� ������ ����ũ�� ���� ���� ��� ���� ���̴�.
| |
 |
|
| �� ����Ʈ�κ�ƽ�� ���� �ð� �ִ� �浵�� ���� |
����Ʈ �κ�ƽ�� ��(Soft Robotics Lab)�� �浵�� ������ å���ڷ� �ִ�. ����Ʈ �κ�ƽ�� ���� ���� �κ��� ��� ��������� �����̴� ���� ���� ��ü�� ������ ������ �ִ�. ���� ���� ���� �۾��� �����Ѵٰų� ���ſ� ���� �ű�� �� Ưȭ�Ǿ� ������ ����� ������ �Ѵٰų� Ȥ�� ��� ���ӿ� ���� �۾��� �����ϴ� ���� �������� ���� �Ѱ����� �ִ�. �� �������� 5���� ���������� ������ ��ü�� �ݼ� ���簡 �ƴ� �����ڸ� ����� ���°� ���ϴ� �κ��� ������ ����� �����ϴ� �κ��� ����� ������ �����ϰ� �ִ�. � ����, ���� ��� �ٱ⼼���� �����ϴ� �ʿ� ������ �����ϴ�. ����� �κ��� ���°� �����̴�, ���ο� ����� �ο��� ���� ������ �մ´ٰų� �κ��� ���ӿ��� �������� Ǯ������ �ϸ鼭 ��⸦ ����� ���ο� ����� �����ϴ� ������ �ϰ� �ִ�. ��ü ģȭ���� ������ �ռ��ؾ� �� ������ ���縦 �����ε� �ؾ� �Ѵ�.
| |
 |
|
| �� ����Ʈ�κ�ƽ�� �� ������. �Ϸ�Ʈ��-������ ��� ����ũ�� ���߿����� |
�� ������ �����뿡�� �ڻ縦 �ϰ� �̱� UC��Ŭ������ 5�Ⱓ �ڻ��� ���������� �ٹ��ϴ� �۳� 2�б���� ������� ���������� KIMERo�� �շ����� ���� 1�� ���� �Ǿ���.
| |
 |
|
| ����� AI���� ���� ���߿����� �� B�� �ð� �ִ� ������ ���� |
���� AI ��(Medical AI Lab)�� ������ ������ å���� �ð� �ִ�. ���� AI ���� ����ũ�� �Ƿ� �κ��� ������ �� ������ �̿��� ����ũ�� �Ƿ�κ��� ������ �ϴ� ��γ� �������� �����ϱ� ���� ����Ʈ��� ����� ������ �ַ� �ϰ� �ִ�. �Ƿ� ������ ��ǥ��� �� �� �ִ� CT�� �������̸� �̿��� �ǽð����� 3���� ���� ���� �����, �� ���� Ȱ���� ��� ��ȹ �ϴ� �������� �����ϰ� �ִ�. �̿ܿ��� ���ð� ���� ���� Ȱ���� �ΰ����� ��� ����� ���� �ν��̳� ����ũ�� �Ƿ�κ��� �Ƿ� ������ ������� ���� ��� ��ġ�� �ִ��� � ���õ� ������ �����ϰ� �ִ�.
������ ���������� ������ ���� �ְ��� ���ϱ� ������ �� �ְ��� ��� ������� �ּ�ȭ�� ���̸�, ���� ���������� Ȱ���� �κ��� ������ �� �������� �����ϱⰡ �������� ��ƴ�. ���� �̷��� ����� �����ϴ� ������ �� ���� �ϵ��� ������ ���� �� �ְ��� �ּ�ȭ�ؼ� �����ϰ� ������ �� �ִ� �κе��� ���� ����� �κ��̰� �ذ��ؾ� �� ������.
| |
 |
|
| ����� AI �� ���� ���� |
�� ������ ��Ż���ƿ��� ���̿� �κ�ƽ���� �����ϰ� �ͱ��� ����ũ���Ƿ�κ����Ϳ��� 3�� ���� ���������� �ٹ��ϴ� �۳� ������ ������ �����ߴ�.
���� ���߿����� ��(Medical Actuators Lab)�� ����ũ�� �κ��� �����ϱ� ���� ������ ���� ��ġ�� �����ϴ� ������ �ϰ� �ִ�. �ɵ� ĸ��, � ��� ����ũ�� ���� �� �������� ü������ �̵���Ű�� ����ũ�� �κ��� ����� �ο��ϴ� ������ �ϰ� �ִٰ� �� �� �ִ�. ���� ���߿����� �� A�� ���� ���߿����� �� B�� ���еǾ� ������, �� A�� ��â�� ����, �� B�� ������ ������ å���� �ð� �ִ�.
�� A�� ���ڱ����� �����ϴ� �ڱ��� ������ �ڱ� ���� ��� ������ �����ϰ� �ִ�. ���ڱ����� ������ ����ũ�� �κ��� �̵���Ű�� �ý��۰� ���� ����� ����� ���� �������� ������ �����ϰ� �ִ�. ���������� �Ƿ��� ��ġ �νİ� ������ �Ǿ�� �Ѵ�. ��������δ� ����ִ� �������� �������� ������ �־� �Ƿ� ���䰡 �������� ���� ���ƾ� �Ѵ�. ���� �� ���� ����� ����� ���ڱ����� ���� �Ǹ� ���� ���� ������ �ý����� Ŀ���� ������ ���ϴµ� ���ӿ� ������ ���� ũ�⸦ Ű�� ���� ����. �ܱ����� ���ߵ� ����� ��� ���� 8���̳� �ȴ�. ũ��� ���Ը� ���̴� �� �߿��� ����̴�. �����ҿ����� ���� ������ �ý����� �ƴ� ��ü������ �̵���Ű�� �κ����� �����ϰ� �ִ�.
| |
 |
|
| �� ����ũ���Ƿế(400 ����ũ�ι���ũ��) 3D ���� ���� |
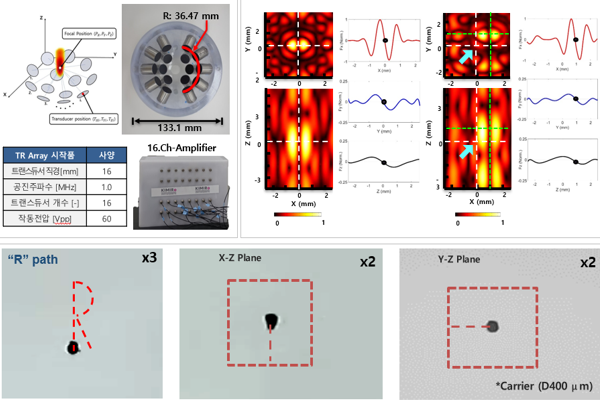
�� B�� ������ ���� ����� �̿��� ����ũ�� �Ƿ�κ��� �����ϱ� ���� ���� ����� �����ϰ� �ִ�. ���� ������ͺ��� ���� ����ũ�ι��� ũ���� ����ũ���Ƿ�κ��� �������� �����ϰ� �����ϱ� ���Ͽ�, ������ ����� ��������� ���� ��õ����� �����ϰ� �ִ�.�����ĸ� �̿��� ����ũ�� �Ƿ�κ��� �����Ѵٴ� ���� ������ ���� �̿��� �ű�� ������ ���� ������ ����ũ�� �κ��� �����ϰ� �Ǵµ� �� ������ ���� ������ ���ݿ� ���� �ְ��� ���ϵ��� ������ ���� �´�. ������ ������ ������ �ִ�, ���� ��� ���� �߿��� � ���ڸ� �����Ѵٰ� ���� ���� �ս��� ������ �� ������ �پ��� ������ �����Ǿ� �ִ� ��ü �ȿ����� �ְ��� ���� ���ϱ� ������ ����ũ�� �Ƿ�κ��� �����ϰ� �����ϴ� �� ������ ������� �ִ�. ���� ���������� �̿��� ���� ����� ��� ��õ ������ ������ ���� �����ϰ� �ִ�.
| |
 |
|
| �� �κ����ø����̼� ���� ���� ���߿����� �� A�� �ð� �Ҵ� ��â�� ���� |
�κ� ���ø����̼� ��(Robot App. Lab)�� ��â�� ������ å���ڷ� �ִ�. ����� �κ� ���õ� ������ �ϰ� �ִ�. ��ǥ���� ���� ���̺� �κ��̴�. �̿ܿ��� ����� �κ��� �Ϲ����� ����� �κ� ���� ����� �����ϰ� �ִ�. ���̺� �κ��� ������ ���� �κ��ε� ������ ������ ������ �а� Ȱ���� �� �ִٴ� ������ �ִ�. �츮�� ���� �� �� �ִ� ��ī�� ķ, � ������̳� �ø����� ���� ī�� ���� �� �Կ��ϴ� �͵� ������ ������ ���̺� �κ��̴�. ������������ �� �����ѵ� ����ϱ� ���� 8���� ���̺��� ����ϰ� �ִµ� �����κ�, ����� Ż�� �ִ� �������θ�Ʈ�����ε� ����� �����ϴ�.
| |
 |
|
| �� ���� ���̺� �κ� |
�� ������ �������ָ��뿡�� �ڻ��� ���������� �����ϴ� 2017�� 3������ ������ ��� ���к� ������ �ӿ�Ǹ鼭 �������� �շ��Ͽ���.
34�Ⱓ ������Ʈ ����...������ � ���� ������ ������Ʈ �������� ���� �߷� �پ� �ٳ�
������ ��ܹ����� ������ �������� ��ϴٺ��� ���� ����� �κ��� �������� ��̸�, ���� ū ȭ�ΰ� �ڱ� ������. ���ٺ��� �� ������ ���� ���� ������Ʈ ���ֿ� ���� �پ�ٴϰ� �ִ�. ���� ��Ȱ 34�� ���� �״� ������Ʈ �����ϴ��� �� ���ž��� ��Ҵٰ� ȸ���ߴ�.
�̷��� ���� ���п� �츮����� ����ũ���Ƿ�κ� �о߿��� ���踦 �����ϰ� �ִ�. �� ������ “�츮�� ����ũ�� �κ��� �����̶�� ���� ���� ������, 1�� �쿡�� �翬�� �� �ִ�. ����ũ�� �Ƿ�κ��� ũ�� ��� ���� ��İ� ��ü ���� ������� �з��� �� �ִµ� ���� ���ð�, ĸ�� ���ð� �κ��� �������� ��� ���� ������� �̹� ���� ������ �ϰ� �ִ�. 2010��� ������ ����κ��� �����ϸ鼭 ��ü ���� ��� ����ũ�� �Ƿ�κ��� �����ߴ�. �� �оߴ� KIMIRo�� �������� ������� ���߰� �ִ�. 2019� ������ ������ �ǿ�ȭ ���� ��� ������ �������Ǹ� �� �� �Ŀ��� ���� ���� �����۵��� ���� ���� ������ �����ϰ� �ִ�."�� ���ߴ�.
�� ������ "������� �� �� �־��� ���� ��κ� ���ηκ��� ����� �����߱� �����̶�� ������ ���� �ڱ��� �� �Ἥ ����� ��������ϰ� ����� ������Ű�� �ϸ� ���Ҵ�"��, ”����ũ�� �κ��� ����� ��Ư�ϰ� ���ο� ÷�� �о��ε� ���ΰ� ������ ������ �ص� ���� ���� �����ϴ�“�� ���ٿ���.
| |
 |
|
| �� �ѱ�����ũ���Ƿ�κ��������� �̲��� �ִ� �ֿ� �����. ���� ���ʺ��� ��â��, ȫ�ƿ�, �浵�� ����, ������ ����, ������ ����, ������ ����, ���Ǽ� ����, ����ǥ ���� |
���� ������ ��� ��������� ��� �������� ����
���� �ʸ� ���� 3�� ���� �ӱⰡ ������ �ȴ�. �������� �����鼭 �� �̷�� ���� ���� �ִٸ� KIMIRo�� ��������������� ����� ������ �Ǿ����� ���ڴٰ� �ߴ�. �״� ���� �ְ��� ����ũ���Ƿ�κ�������, ���� �ִ��� ����ũ���Ƿ�κ� ������÷��� ������ ��ǥ��� �ߴ�.
����ũ�� �Ƿ� �κ� �о߿� ���� ���� ������ ���� ���̴�. ���ð� �о� ���� ������� 3%�ε� ĸ�� ���ð��� �� ���� 6~7%��. ��� �Ƿ� ��Ⱑ �ּ� ħ������ �귯 ���� �ֱ� �����̴�.
�ٻ� �ϻ��Ȱ �ӿ����� �� ������ �����κ�����(IFR) �ѱ���ǥ�ε� Ȱ���� Ȱ���ϰ� �ִ�. �� ������ �ֱ� IFR �帧�� ���� 1961� ����� �κ� Ư�㰡 ó�� ������ ���� 40���� �귶�µ� 20����� ����� �κ��� �ô뿴��. 21���� ��� ���� �κ��� ���� �Ǿ����� ���� �Ը�� ���� ����� �κ��� ���������� ũ��. �ֱ� ����� �κ��� �� ���� Ʈ���尡 �ϳ��� �ں�(���� �κ�)�̰�, �� �ϳ��� ����� �κ��̶��, IFR�� AI �κ��� ���ؼ��� ����� �������̶�� ������.
| |
 |
|
| �� ������ �ѱ�����ũ���Ƿ�κ����������� 34�� ���������� �����ϸ鼭 ���� ����, ���� �տ��� ����Կ��� �ϰ� �ִ�. |
�� ������ ���� �κ��� �� ���� ���� �ŷڼ� ���� ������ ����. ����� �κ� ������ �ӵ��� Ŀ���� �ִ�. ���� ���� ��ȸ ���� ���µ� ���� �κ��� �����ϴ� ���� ���� ��ź�ߴ�. �� ���������. �� ��������ٴ� �� ���� ���� ����ġ ���� ����� ���� ����� �ݿ��ϰ� ����ϰ� ���� ���ƴٴϰ� �ִ�. �Ĵ�, ����������� ���� �κ��� ������ ����� Ŀ�� �� ���ٴ� ������ �Ҵ�. �츮���� �κ� ����鵵 ���� ���ܳ��� ��ǰ�鵵 �پ������� �־� ���� �κ������ ���������� ���� �ִٰ� �����ߴ�.
��� ���� �����ǿ� ���ߵǾ� �ִ� ��Ȳ���� ���ֱ����ð� �����̶�� �ڵ�ĸ�� �غ��ϰ� ����ũ���Ƿ�κ��̶�� Ưȭ�� �κ� �о߿� 10�� �̻� ������ �����ϰ� ������ ��� ���ִ� ���ѹα��� �Ѿ� ������ ����ũ���Ƿ�κ� �о��� ������ �Ǿ���. �̰����� �� ���� ��������� �P���� ���� �η� ������ Ŀ�ٶ� ��� ������ ���ڴ�.
[�ѱ�����ũ���Ƿ�κ������� ����]
2019. 01 ��ܹ��� �ѱ�����ũ���Ƿ�κ������� ����
2019. 06 ���Ǻ����� ‘����ũ�� �Ƿ�κ� �ǿ�ȭ��������’ ����
2020. 05 ���Ǻ����� ‘����ũ���Ƿ�κ� ������������ ����’ ��� ����
2020. 06 �ٱ⼼�� ž���� ����ũ�ηκ����� ����������� ù ����
2021. 03 ��ȯ ������ ����ũ�ηκ� ���� ����ȭ ��� ����
2021. 04 ��ü���� ��� �ΰ����� ����
2021. 05 ����ó���ֱ��Ƿ��� ��������� ���� |
















