| |
 |
|
| ▲카멜레온을 적용한 물류 로봇 |
자율주행 로봇 서비스 프로바이더 클로봇(대표 김창구)이 그래픽 사용자 인터페이스(GUI:Graphic User Interface)를 기반으로 설계된 범용 실내 자율주행 솔루션 ‘카멜레온(chameleon)’을 출시했다.
‘카멜레온’은 모빌리티 로봇에서 산업용 장비까지 다양한 타입의 기기에 적용이 가능해 쉽고 빠르게 주행 성능이 보장된 자율주행 로봇을 구현할 수 있다는 장점을 갖추고 있다. 클로봇은 지난해부터 물류기업 산업용 로봇, PC방 서빙로봇, 병원 의료보조 서비스 로봇 등에 ‘카멜레온’을 시범 적용해 기능 검증을 완료했으며, 사용성 강화를 위해 새롭게 GUI를 개발했다.
| |
 |
|
| ▲ 카멜레온을 적용한 PC방 서빙 로봇 |
| |
 |
|
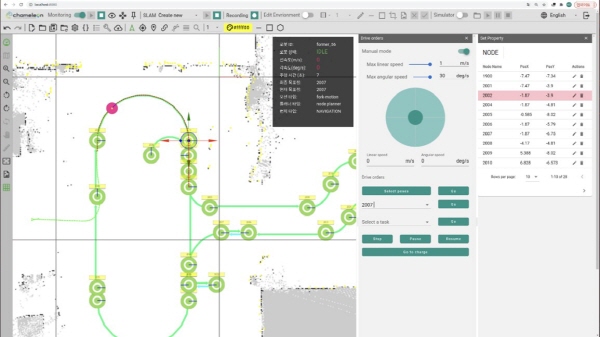
| ▲카멜레온의 GUI |
‘카멜레온’은 좁은 통로나 예측이 어려운 장애물이 존재하는 환경인 병원, PC방 등에서도 자율주행 로봇을 운영할 수 있도록 주행 성능 고도화를 목표로 딥러닝 기술과 고정밀 위치 추정 기술(SLAM:Simultaneous Localization and Mapping)을 적용했다. 또한, 범용 솔루션으로 고객이 필요한 실내 자율주행 로봇의 기능을 구현할 수 있도록 다양한 프로토콜과 센서융합, 로봇운영체제(ROS: Robot Operating System) 연동 등을 지원한다.
주요 기능으로는 ▲GUI 기반의 지도 및 주행 경로 편집 ▲다수 로봇 주행 최적화 관리 ▲엘리베이터 승하차 ▲사용자 추종 기능 ▲플릿 매니지먼트 등이 있다.
‘카멜레온’을 적용한 로봇은 클로봇의 이기종 로봇 관제 솔루션 ‘크롬스(CROMS)’와의 연동을 통한 상시 업그레이드 및 운영관리가 가능해 관리운영에 대한 부담을 최소화할 수 있다.
김창구 클로봇 대표는 “카멜레온은 국내 B2B 로봇 비즈니스 분야를 선도해 온 클로봇이 4년간 50여곳의 고객사에 로봇을 구현하며 쌓은 전문성을 바탕으로 개발한 자율주행 솔루션”이라며 “실내 자율주행 로봇에서 주행 성능이 가장 중요한 요소인 만큼, 지속적으로 기능을 고도화해 국내 및 해외 시장에서 고객을 확보할 수 있도록 적극적인 마케팅 활동을 펼칠 것”이라고 말했다.
클로봇은 25일부터 28일까지 일산 킨텍스 1전시장에서 개최되는 제11회 국제물류산업대전을 통해 ‘카멜레온’을 선보일 예정이다. |
















