|
지난호에서는 농업용 로봇에 대해 개괄적으로 살펴보았으며, 아래에서는 농업용 로봇 관련하여 특허 예를 살펴보기로 한다.
미국특허 제7,765,780호
이 농업용 로봇 시스템은 2004년 12월 9일 출원하여 2010년 8월 3일 미국에 등록되었으며, 현재 유럽과 호주등에 출원되어 있다.
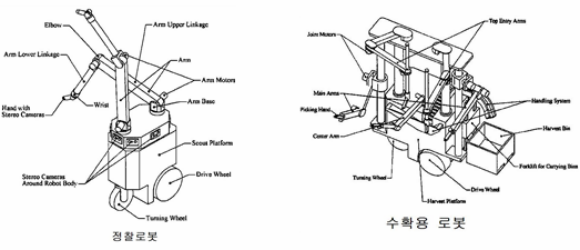
이 특허는 크게 정찰로봇과 수확로봇으로 구성되어 있으며, 정찰로봇은 제1식물 및 이와 근접한 제2식물의 위치 및 과일 위치 등을 맵(map) 생성하고 정찰하도록 프로그램되어 있고, 정찰로봇의 맵 정보로부터 수확로봇의 이동경로 및 과일의 픽킹계획에 따라 수확로봇이 작동하도록 되어 있다.
실시예의 로봇은 각각의 나무 및 과일의 위치, 과일의 갯수와 사이즈 및 대략적인 위치를 맵핑하며, 맵핑 프로세서를 단순화하기 위해 GPS 센서를 포함할 수 있고, 로봇의 암 및 암에 설치된 카메라는 과일 위치를 매핑하기 위해 나무의 구석구석 진입할 수 있도록 되어 있다.
미국특허는 수확용로봇에 복수의 픽킹 암들을 탑재하여서 정찰로봇으로부터의 데이터에 의해 복수의 픽킹암들이 과일등을 수확하도록 함으로써 보다 생산성을 향상시킬 수 있는 것으로 보인다.
한국특허 제0784830호
이 특허는 “벤치 재배형 딸기 수확 로봇 시스템”으로서 특허권자가 ‘대한민국’으로 2006년 6월 출원하여 2007년 특허등록된 것이다.
| |
 |
|
| ▲ 한국특허 제0784830호 벤치재배형 딸기수확 로봇시스템 |
이는 딸기를 탐색하기 위해 수평으로 한쌍의 CCD카메라(312, 314)가 구비되어 사람의 시각으로 사물의 입체정보를 얻게 되는 2CCD카메라 방식의 기계시각부(310)와 사물과의 거리를 측정하여 높이를 감지하는 레이저센서부(320)가 결합되는 영상처리부(330)와; 영상처리부(330)에서 획득된 작업장의 정보를 전자제어어셈블리(550)를 통해 원거리에서 인지 및 제어하는 PC원격제어부(500)와; PC원격제어부(500)에서 조종 및 제어로 구동되며 좌우평행으로 형성된 주행레일(50)에는 좌우평행인 X좌표(110)로 구동되는 X축모터(62)를 구비하며 수직인 Y좌표(120)로 구동되는 Y축모터(64)와 Y구동축(66)을 중심으로 θ좌표(140)로 회전되는 θ축모터(68)를 구비하고 Y구동축(66)이 구비되는 하체부(200)와; Y구동축(66)과 연이어 형성되며 전후수평인 Z좌표(130)로 구동되는 Z축모터(69)를 구비하고 거리조절부(350)가 형성되는 상체부(300); 및 상체부(300)의 일단에 형성되어 전후수평인 제2Z좌표(150)로 구동되는 거리조절모터(74)를 구비하고 수직인 제2Y좌표(160)로 구동되는 수평조절모터(76)를 구비하며 거리조절모터(74) 및 수평조절모터(76)의 결합구동으로 제2X좌표(172)를 중심으로 회전되는 γ좌표(170)로 구동되고 딸기의 줄기를 파지및 절단하는 핸드부(410)가 형성된 종단작업부(400);로 구성되어 있다.
이와 같은 벤치 재배형 딸기 수확 로봇 시스템은 딸기의 인식 및 좌표 추출을 위해 기계시각과 레이저센서를 결합하고, 자연광 하에서도 작업이 수행될 수 있도록 색도, 채도, 형태기반의 영상처리 소프트웨어 및 벤치 재배 환경에서 수행될 수 있는 소형 경량 구조의 로봇 매니퓰레이터를 채택하고, 딸기에 직접적인 접촉 없이 수확작업을 수행할 수 있도록 7자유도 종단 작업기를 채택하여서 작업 시간대의 제약에서 자유로울 수 있으며 프로그램에 의해 작업 적응성이 높도록 한다.
한국특허 제1374802호
| |
 |
|
| ▲ 한국특허 제1374802호 농업로봇시스템 |
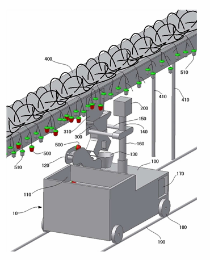
이 ‘농업 로봇시스템’은 2014년 3월에 특허등록한 것으로서, 최근 개발되고 있는 수확장치들이 주로 다관절 매니플레이터(manipulator)를 구비하고, 매니플레이터 종단의 엔드이펙트(end-effector)에 과병 절단을 위한 칼날 등 절단장치를 구비하여서 과병절단 시 작물 개체 간에 각종 바이러스나 병균을 전염시킬 수도 있어서 작물위생에도 좋지 못한 점을 해결한 것이다.
이 로봇시스템은 레이저 빔을 발생시키는 레이저 빔 발생기(250)와; 레이저 빔 발생기(250)에서 출력된 레이저 빔(251)을 스캔시켜 과병절단하는 갈바노 스캐너(210)와; 갈바노 스캐너(210)의 스캔 면(255)을 향하여 마주보게 설치되며 과실을 촬영하는 카메라(220)와; 카메라(220)로 부터 과실 또는 꽃을 포함하는 화상을 촬영하는 화상취득부(910)와; 화상취득부(910)에서 촬영한 화상에서 과실과 과병을 인식하는 화상인식부(920)와; 화상인식부(920)의 화상인식 정보로부터 과병절단 대상영역을 검출하는 대상영역검출부(930)로 구성되며, 대상영역검출부(930)에서 검출한 대상영역 정보를 근거하여 갈바노 스캐너(210)를 구동하여 대상영역에 레이저 빔(251)을 스캔시켜 과병절단 하도록 형성된다.
| |
 |
|
| ▲ 레이저로 과병 절단을 함으로써 작업속도가 빠르고 작물 손상을 막으며 바이러스 및 병균의 전염을 막는다. |
종래에는 수확시 엔드이펙터가 수확대상 과실에 접근하여 과병에 물리적인 힘을 가함으로써 과병을 절단하였던 것과는 달리, 이와같은 로봇시스템은 레이저 빔(laser beam)으로 과실의 과병을 절단하거나 꽃솎기 함으로써 작업을 빠르게 할 수 있고, 무접촉 작업으로 작물의 손상 방지와 바이러스 및 병균의 전염을 막을 수 있도록 한다.
농업기술실용화재단은 "최근 20년 새 우리나라 농촌은 고령화가 진행되는 동시에 인구까지 대폭 감소했다"며 "부족한 농업 노동력 문제를 해결하고 위험한 작업에서 농업인의 건강을 지키기 위해 대안으로 농업용 로봇이 떠오르고 있으며 향후 농업로봇은 우리나라 농업 경쟁력을 높이는 핵심 기술이 될 것"이라고 한다.
농업용 로봇은 과실의 종류 및 위치, 과실마다의 익은정도, 색상, 지형등에 따라 다양한 형태의 것이 개발될 수 있는 바, 개발부분이 상당히 존재하여 핵심기술을 선점하는 것이 중요한 때이다. |