| |
 |
|
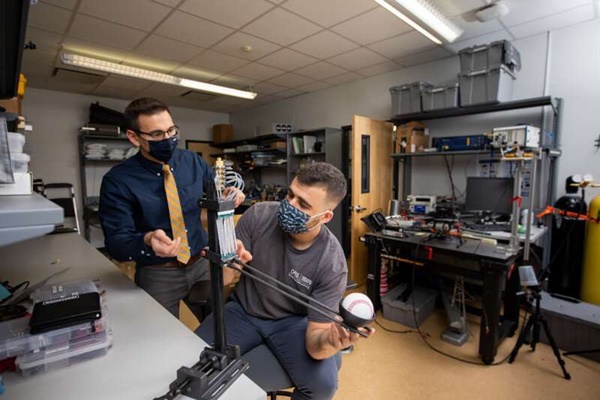
| ▲미국 노던애리조나대(NAU) 기계공학과 마이클 샤퍼와 대학원생 디에고 하이괴라스-루이즈가 카바타피 인공 근육으로 작동하는 새로운 로봇 팔을 육안으로 검사하고 있다. (사진=NAU) |
미국 노던 애리조나대(NAU) 연구원들이 인간 골격근육에 비해 특정작업에서는 10배, 힘으로는 5배 강한 수치를 보이는 코일형 또는 나선형 구조의 인공근육 액추에이터를 개발했다고 ‘테크익스플로어’가 보도했다.
NAU 연구팀은 개발을 계속할수록 훨씬 더 높은 수준의 성능을 낼 것으로 기대하고 있다. 마이클 샤퍼 노던애리조나대 기계공학과 부교수, 하이디 파이겐바움 기계공학과 교수는 대학원생인 디에고 하이괴라스-루이즈와 함께 '사이언스 로보틱스(Science Robotics)'에 자신들이 역동적 능동 시스템 연구소(Dynamic Active Systems Laboratory)에서 개발한 고성능 인공근육 기술을 보여주는 논문을 발표했다. 논문 제목은 ‘뽑아내기, 뒤틀기, 코일링 폴리머 튜브로부터 나온 카바타피 인공근육(Cavatappi artificial muscles from drawing, twisting, and coiling polymer tubes)’이다.
이 논문은 유연성과 적응력을 가진 이 신기술이 어떻게 더욱더 인간같은 움직임을 가능케 하는지, 그리고 어떻게 몇 가지 수치에서 인간의 골격근육을 능가하는지 자세히 설명한다. 샤퍼는 “우리는 이 새로운 선형 액추에이터가 이탈리아 파스타와 닮은 점에 착안하여 이를 카바타피 인공 근육이라고 부른다”고 말했다.
| |
 |
|
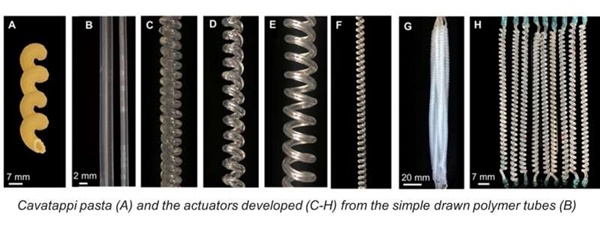
| ▲단순히 뽑아낸 폴리머 튜브(B)에서 나온 카타파피 파스타(A)와 액추에이터(C-H).(사진=NAU) |
그는 “카바타피 인공근육은 비틀린 폴리머 액추에이터(TPA)를 기반으로 하는데, 이들은 강력하면서도 가볍고 저렴해 처음 나왔을 때 상당히 혁명적이었다. 하지만 이들은 매우 비효율적이고 작동 속도가 느렸다. 열을 가하고 식혀야 했기 때문이다. 게다가 이들의 효율은 겨우 2%에 불과하다. 카바타피의 경우 우리는 가압된 액체를 사용해 작동함으로써 이 문제를 해결했다. 따라서 우리는 이러한 장치가 사용될 가능성이 훨씬 높다고 본다. 이 장치들은 우리가 액체를 펌프질할 수 있는 만큼 빠르게 반응한다. 가장 큰 장점은 효율성이다. 우리는 소프트 액추에이션 분야에서 매우 높은 수치인 약 45%의 수축 효율을 입증했다”고 말했다.
연구진은 또 이 기술이 소프트 로봇 애플리케이션, 기존 로봇 액추에이터(예: 보행 로봇) 또는 외골격 또는 보형물과 같은 보조 기술에도 사용될 수 있다고 생각한다. 샤퍼는 “향후 작업에는 무엇보다 단순성, 저비용, 경량, 유연성, 효율성, 변형 에너지 회복 특성으로 인해 많은 응용 분야에서 카바타피 인공근육이 사용될 것으로 기대한다”고 말했다.
| |
 |
|
| ▲카바타피 인공근육의 수축반응 및 생체모방적 적용 방법.(사진=하이괴스-루이즈 외, 사이언스 로보틱스) |
로봇공학 분야에서 연구원들은 로봇이 의도한 기능을 수행하는 데 필요한 움직임을 작동시키거나 가능하게 하는 가장 빠르고, 강하고, 효율적이며, 가장 비용이 적게 드는 방법을 지속적으로 찾고 있다. 새롭고 더 나은 작동 기술과 소프트 로봇에 대한 탐구는 종종 생체모방학(biomimetics)의 원리에 기초한다. 여기서 기계 구성 요소가 인간의 근육의 움직임을 모방하도록 설계되고 이상적으로는 그것들을 능가하도록 설계된다.
전기 모터 및 유압 피스톤과 같은 액추에이터의 성능에도 불구하고, 이 액추에이터의 경직된 형태는 배치를 제한한다. 로봇이 더 많은 생물학적 형태로 전환되고 사람들이 더 많은 생체모형 보형물(인공기관)을 요구함에 따라 액추에이터도 진화를 요구받고 있다. |
















