|
중국에서 강한 힘을 갖고 있으면서도 팔 처럼 유연하게 움직일 수 있는 로봇 기술이 개발됐다.
2일 중국 언론 커지르바오(科技日报)에 따르면 톈진대학 현대기구학 및 로봇학 센터의 캉룽졔(康荣杰) 부교수팀이 신형 '연속체 바이오 로봇'을 개발했다. 강성과 연성을 동시에 가진 이 로봇은 팔뚝의 형상을 하고 있다.
최근 연구 성과를 활용해 공간에서 잡기 어려운 목표물을 포획하는 데 적용하기 시작했다.
연구진은 이 로봇기술이 우주에서 '캐처(Catcher)' 기능을 할 수 있을 것으로 기대하고 있다. 예컨대 기능을 상실한 위성이나 우주 파편 등을 처리하는 데 활용될 수 있다는 설명이다. 연구성과는 '기하학적 제한이 있는 기억합금 변강도 신형 연속체 로봇 모델링 및 분석'이란 제목으로 로봇분야 국제학술 저널인 'IJRR(The International Journal of Robotics Research)'에 개재됐다.
이 연속체 로봇은 일종의 코끼리 코나 문어 촉수 등 연성 생물체를 닮았다. 극강의 구조적 연성과 환경 적응성을 자랑한다. 복잡한 센서 시스템을 장착할 필요 없이, 미지의 환경에서 장애물을 피하며 탐색 작업 등을 할 수 있다. 전통 로봇의 경우 규정된 공간 내에서만 작업 가능한데, 이 같은 한계를 극복했다.
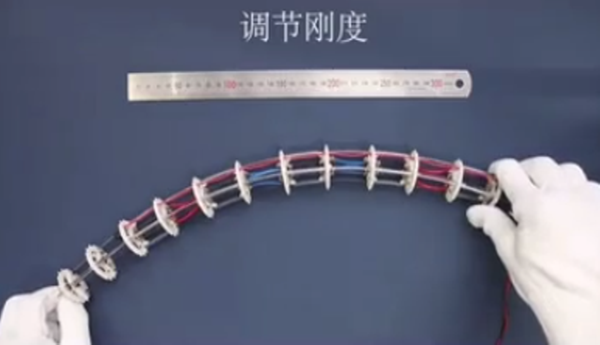
톈진대학이 개발한 이 로봇은 본체가 니켈-티타늄 합금으로 제작된 골조와 3D 프린팅 기술로 제작한 바인딩 트레이로 구성돼 있다. 바인딩 트레이 주위에 균등하게 분포된 구동 와이어가 본체의 구조를 제어해 능동적으로 완곡한 구조를 만들거나, 환경 변화에 따라 변형을 꾀할 수 있다.
시야 사각지대에선 로봇의 말단에 있는 카메라와 로봇팔이 장애물을 피하면서 목표물을 잡을 수 있게 해준다. 연성구조의 부하 능력을 높이기 위해 연구진은 로봇 내부에 기억 합금 드라이버로 된 강도 조절 기구를 설계했다. 로봇이 예정된 조작 위치에 다다르면, 구동 와이어와 바인딩 트레이가 결속되면서, 로봇의 강도를 3배 이상 높여준다. |