| |
 |
|
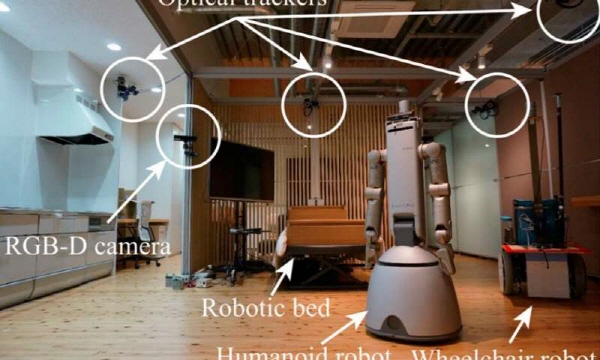
| ▲ 규슈대 연구팀(Kyushu University)이 마련한 실험 환경. 광학 추적 시스템은 로봇과 실내의 물체를 추적하고, RGB-D 카메라는 주로 인간의 움직임을 추적한다.(사진=테크엑스플로어) |
일본 규슈대(Kyushu University) 연구팀이 최근 로봇의 움직임을 예측하도록 이미지 정보를 제공하는 시스템을 개발했다고 ‘테크엑스플로어’가 보도했다.
‘프리뷰드 리얼리티(Previewed Reality)’라고 명명된 이 시스템은 한 공간에 있는 사람과 로봇, 주변 가구 등에 대한 위치 정보를 모은 데이터 세트를 바탕으로 조만간 일어날 가능성이 있는 사건을 미리 보여준다. 사용자는 VR(가상현실) 또는 AR(증강현실) 헤드셋을 이용해 이를 확인하여 사고나 충돌 등에 대비해 적절한 행동을 취할 수 있다. 이번 연구결과는 국제적인 학술지인 ‘어드밴스드 로보틱스(Advanced Robotics, AR)’에 실렸다.
이 시스템은 위치정보를 수집하기 위해 전략적으로 배치된 광학추적기와 RGB-D 카메라를 사용한다. 광학추적기는 물체나 로봇의 움직임을 감지하고, RGB-D 카메라는 사람의 행동을 추적한다. 수집한 데이터는 동작 계획기(motion planner)와 동적 시뮬레이터(dynamics simulator)로 보내진다. 이 둘을 결합하면 주어진 환경의 변화를 예측하고, 특정한 사람의 관점에서 볼 때 발생할 가능성이 높은 사건의 이미지를 합성할 수 있게 된다.
사용자는 VR 헤드셋 또는 AR 디스플레이를 착용해 합성된 이미지를 볼 수 있다. 이는 앞으로 일어날 환경의 변화를 분명하게 보여주기 위해 실제 환경 이미지에 가상 이미지가 배치된 형태로 나타난다.
프리뷰드 리얼리티는 로봇의 안전 경로를 확인하도록 고안된 충돌 방지 시스템을 보완하거나 대체할 수 있을 것으로 기대되고 있다. 특히 다양한 실내 환경에서 인간과 로봇이 안전하게 상호작용하는 데 도움이 될 것이라는 설명이다.
연구팀 관계자는 "프리뷰드 리얼리티는 인간과 로봇 시스템 간의 인간 친화적인 소통을 제공한다"며 "인간에게 발생할 수 있는 상황을 직관적인 방식으로 인간과 로봇에게 알려 양자가 안전하게 공존할 수 있도록 해준다”라고 설명했다. 연구팀은 앞으로 스마트 폰 등 휴대용 기기를 활용해 가볍고 저렴한 버전의 인식 시스템을 개발한다는 계획이다. |
















