獨 FZI, 로봇이 다양한 물체 잡도록 학습시키는 기술 개발스파이킹 뉴럴 네트워크(SNN) 사용
승인 2020.11.09 19:47:51
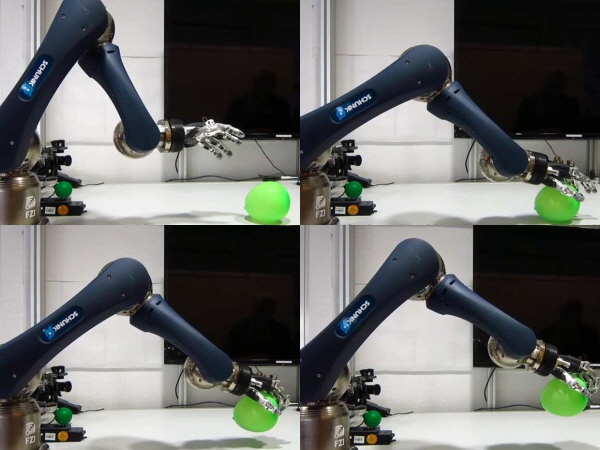
▲ 이번에 개발한 로봇 시스템은 인간의 손과 관절 수가 같은 ‘슝크(Schunk) SVH 5 핑거 핸드’라는 이름의 로봇 손을 사용한다.(사진=FZI)
독일 카를스루에 있는 FZI( Forschungszentrum Informatik, 컴퓨터 과학 연구센터) 연구팀이 로봇이 세 가지 파지(Grasping) 동작을 통해 상이한 모양과 단단함을 지닌 물체를 잡도록 학습시키는 로봇 시스템을 개발했다고 ‘IEEE스펙트럼’이 보도했다.
기존의 로봇 시스템은 궤적을 추적하고 물체를 잡기위해 광범위한 연산을 필요로 했다. 반면 연구팀이 개발한 로봇 시스템은 스파이킹 뉴럴 네트워크(SNN, Spiking Neural Network)라는 인공신경망을 기반으로 보다 나은 모델 시스템과 물체 움직임에 맞춰 신경망을 훈련시킨다. 이후 실시간으로 물체의 움직임에 적응해 자율적으로 이를 파지한다.
이번에 개발한 로봇 시스템은 인간의 손과 관절 수가 같은 ‘슝크(Schunk) SVH 5 핑거 핸드’라는 이름의 로봇 손을 사용한다. SNN을 통합한 이 시스템은 여러 서브 네트워트를 통해 손가락을 구부리거나 펼치는 등 각 손가락을 개별적으로 제어하고 집기, 구체 모양 잡기 등 각 유형에 따른 파지 동작을 수행한다. 신경회로는 모터의 전류와 관절의 속도를 사용해 각 손가락이 물체와의 접촉을 감지하도록 해준다. 접촉이 감지되면 컨트롤러가 작동해 손가락이 발휘하는 힘을 조절한다.
이를 통해 상이한 모양과 단단함, 크기를 지닌 물체들을 파지할 수 있게 된다. 또한 물체가 움직이거나 형태가 변해도 파지 동작을 빠르게 수정할 수 있다.
연구팀은 로봇 손이 물체의 특성을 모른다는 조건 하에서 세 가지 파지 동작으로 플라스틱, 병, 공, 스펀지, 고무 오리, 풍선 등을 잡는 실험을 진행했다. 실험 결과 집기 동작이 구형 물체를 잡는 동작보다 높은 정밀도를 요구한다는 점을 발견했다.
연구팀은 앞으로 이 시스템에 사건에 기반한 시각정보와 팔의 움직임, 그리고 촉각 센서를 적용할 계획이다. 이를 통해 철저한 계획 없이도 인간처럼 파지할 수 있는 로봇 시스템을 개발한다는 설명이다.