서울과기대, 카멜레온 모사한 '로봇 혀' 기술 개발‘IEEE 로보틱스 앤드 오토메이션 레터스’에 연구 성과 발표
승인 2020.08.19 17:21:12
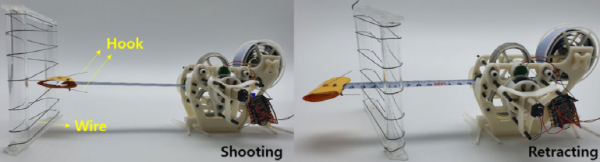
▲ 로봇 혀의 작동 방식(사진=서울과기대)
국내 로봇과학자들이 카멜레온의 혀처럼 재빨리 물체를 잡아챌 수 있는 로봇 기술을 개발했다.
‘IEEE 스펙트럼’에 따르면 서울과학기술대학교 정광필 교수팀은 카멜레온의 혀에서 아이디어를 얻어 물체에 바짝 다가가지 않고도 빠른 속도로 물체를 낚아챌 수 있는 로봇 혀(robotic tongue)인 ‘스내처(snatcher)’를 개발하고, 연구 성과를 전문저널인 ‘IEEE 로보틱스 앤드 오토메이션 레터스’에 발표했다.
이 로봇 혀는 드론이나 로봇에 부착해 물체를 수집하는 데 활용할 수 있을 것으로 기대된다. 정광필 교수는 IEEE 스펙트럼에 “쿼드콥터 드론에 로봇 혀 기술을 이용한 매니퓰레이터를 장착하면 공중에서 거리가 떨어진 곳에 있는 물체를 재빨리 낚아챌 수 있다”고 설명했다.
▲ 드론에 로봇 혀를 탑재해 물체를 낚아채는 기술(사진=서울과기대)
IEEE 스펙트럼에 따르면 로봇 혀의 개발은 이번이 처음은 아니다. 지난 2011년 일본 츠쿠바대학 연구진은 발사체의 끝부분에 자석을 붙여 멀리 떨어진 자석을 재빨리 가져올 수 있는 기술을 개발했다. 당시 연구팀은 70cm 정도 떨어진 곳에 있는 자석을 낚아채는 기술을 선보였다.(아래 두번째 동영상 참고)
이번에 국내 연구진이 개발한 기술은 손쉽게 휴대할 수 있다는 게 장점이다. 이 로봇의 크기는 12x8.5x8.5cm이며 무게는 120g미만이다. 80cm 떨어진 곳에 있는 최대 30g의 물체를 600밀리초 이내에 가져올 수 있다.
▲ 로봇 혀의 구조(사진=서울과기대)
스내처는 스프링 구조를 하고 있다. 단일의 탄성 액추에이터에 능동형 클러치를 연결하고 이 클러치를 이용해 스프링을 제어한다. 스프링은 강철 테이프로 만들어져 2개의 기어 공급장치를 통해 앞으로 펼쳐졌다가 다시 접힌다. 줄자처럼 펼졌다가 다시 접히는 방식이다. 정 교수는 현재 최대 300밀리초 이내에 물체를 낚아챌 수 있는 기술도 개발했다.