화성 탐사 '퍼시비어런스' 로버에 우주등급 F/T센서 탑재ATI인더스트리얼 오토메이션과 NASA 제트추진연구소가 협력 개발
승인 2020.07.28 14:59:33
▲ 이달 30일(현지시간) 화성으로 날아가는 퍼시비어런스 로버(사진=NASA)
미 항공우주국(NASA)의 화성 탐사 로버 '퍼시비어런스(Perseverance)‘가 오는 30일(현지시간) 플로리다주 케이프 캐너버럴 공군기지에서 아틀라스5 로켓에 실려 화성으로 날아간다. 7개월 가량의 긴 여정 끝에 내년 2월 화성에 도착한다.
NASA의 5번째 화성 탐사 로버인 퍼시비어런스는 ‘마스(Mars) 2020’ 프로젝트의 핵심이다. ‘마스 2020’의 주요 임무는 화성에 존재하는 과거 미생물의 흔적을 발견하고, 지표면으로부터 암석이나 토양을 채취해 분류 및 보관하는 것이다. 채취된 암석이나 토양 샘플은 나중에 지구로 보내져 화성의 환경을 연구하는 데 활용될 예정이다. 궁극적으로는 화성의 환경이 사람이 사는데 적합한지를 규명한다.
‘더로봇리포트’ 등 매체에 따르면 로봇 부품 전문기업인 'ATI인더스트리얼 오토메이션(ATI Industrial Automation)'은 NASA 제트추진연구소(JPL)와 협력해 화성과 같은 극한 환경에서 견딜수 있는 우주등급 F/T(포스/토크) 센서를 개발해 퍼시비어런스 로버에 탑재했다.
▲ ATI 우주등급 F/T센서(사진=ATI)
ATI인더스트리얼 오토메이션은 로봇 액세서리, 로봇팔용 툴 체인저(tool changer), 유틸리티 결합장치, 충돌방지 센서 등을 개발 및 공급하는 업체다. 대표 제품은 로봇의 작업 특성에 따라 자동적으로 잠금장치의 결속 또는 해제를 지원할 수 있는 툴 체인저이다.
퍼시비어런스 로버는 샘플 채취 및 보관을 위해 내부에 튜브 형태의 샘플 보관 장치를 갖추고 있다. NASA는 제조공장 등에 활용되는 픽 앤 플레이스(pick-and-place) 전용 산업용 로봇을 모방해 ‘어댑티브 캐싱 어셈블리(Adaptive Caching Assembly)’라는 로봇팔을 개발했다. 어댑티브 캐싱 어셈블리는 드릴을 갖춘 대형의 로봇 팔이다. 장착된 드릴 비트(bit) 모음은 화성 토양에서 샘플을 수집하는 데 활용된다. 어댑티브 캐싱 어셈블리는 수집한 샘플을 분류 체계에 맞춰 튜브에 넣는 일을 한다. 다른 샘플과 섞이거나 샘플간에 오염이 발생하지 않도록 해야한다. ‘어댑티브 캐싱 어셈블리’들이 모여 전체 '샘플 캐싱 서브시스템(Sample Caching Subsystem)'을 구성한다.
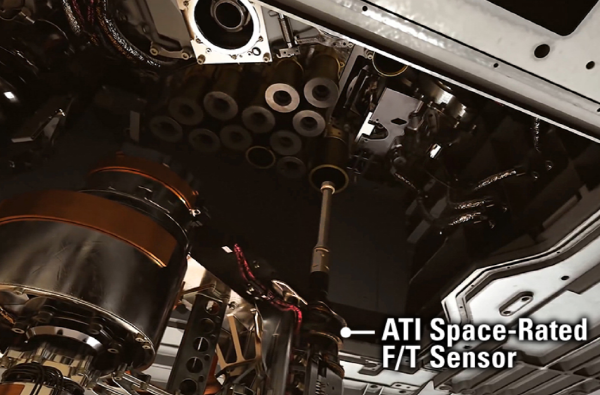
▲ ATI 우주등급 F/T(포스/토크) 센서
퍼시비어런스 로버에는 어댑티브 캐싱 어셈블리와 함께 소형의 로봇팔인 '샘플핸들링 어셈블리(Sample Handling Assembly·SHA)' 있다. SHA는 수집된 샘플을 검사하고 로버에 내장된 실험실 공간에 샘플을 밀봉하는 작업을 수행한다.
ATI가 개발한 F/T센서는 SHA의 엔드 이펙터와 통합돼 토크와 힘을 민감하게 반영, 고정밀 작업을 가능하도록 해준다. ATI가 개발한 우주등급 F/T센서는 화성의 급격한 온도변화에도 견딜 수 있도록 설계돼 정확하게 힘과 토크를 측정할 수 있다.
ATI측은 우주 등급 F/T센서를 지구 환경에서도 활용할 수 있을 것으로 보고 있다. 온도 변화에도 안정적으로 기능을 수행하는 부품이나 극한 환경에서도 신뢰할 수 있는 센싱 능력이 필요한 애플리케이션에 활용 가능하다는 설명이다.