|
국내 산업용 로봇 보급은 주로 자동차ㆍ전기전자 분야에 편중되어 있어, 제조산업 전 분야로 보급을 확산해야 할 필요성이 증가하고 있다. 정부는 지난 2019년 제3차 지능형 로봇 기본계획을 발표하면서 근무환경이 열악한 뿌리산업과 섬유·식음료 등 로봇활용이 미흡한 3대 제조업 중심으로 로봇 보급을 확산한다는 계획을 발표했다. 이를 위해 3대 제조업중 우선적으로 로봇도입이 필요한 108개 공정을 선별해, 작년부터 6개 정부 출연 연구기관과 업종별·공정별 표준공정모델 개발을 시작했다. 2019년 14개를 시작으로 올해 23개를 개발 중에 있고 2023년까지 순차적으로 개발을 완료할 계획이다.
표준공정모델의 적용대상이 되는 공정은 단순반복 업무, 안전사고 노출업무, 근골격계 질환유발 업무 등 주로 작업자들이 기피하는 공정으로서 로봇을 활용하는 경우 공정시간을 단축해 생산성을 높이고, 노동강도를 감소시키거나 근로환경을 개선하는 효과가 있을 것으로 기대된다.
본지는 6대 정부출연 연구기관에서 어떤 표준공정모델을 개발하였고 향후 무엇을 개발할 것인지 6회에 걸쳐 시리즈로 소개한다. [편집자 주]
< 기획순서 >
①한국자동차연구원
②한국식품연구원
③전자부품연구원
④한국기계연구원
⑤한국생산기술연구원
⑥한국섬유기계융합연구원
금속 플라스틱 분야 뿌리산업은 유해한 제조환경, 고중량물, 고위험 등 열악한 제조환경 개선이 필요한 분야다.
로봇활용 공정모델을 개발해 불량률 최소, 생산시간 단축, 품질향상을 통한 제조경쟁력 강화 및 생산성 향상을 도모하는 것은 물론, 고령화 및 3D기피, 외국인 노동자, 최저임금상승 등 중소뿌리기업에 대한 노동 문제에 적극 대응할 수 있다.
| |
 |
|
| ▲ 공정모델개발 로드맵 |
한국생산기술연구원은 뿌리분야(금속/플라스틱)에서 '특수목적기계 아크용접', '금속자동차 부품 저항용접', '주조품 후처리 가공', '금속 자동차 부품 머신텐딩', '금속 플라스틱 표면처리' 등 5개의 뿌리 공정을 대상으로, 오는 2023년까지 매년 4개씩 총 18개 공정모델 개발을 완료할 계획이다. 이중 2개는 개발이 이미 완료된 상황이다.
연구원이 선정한 로봇활용 5개 공정모델을 소개하면 다음과 같다.
| |
 |
|
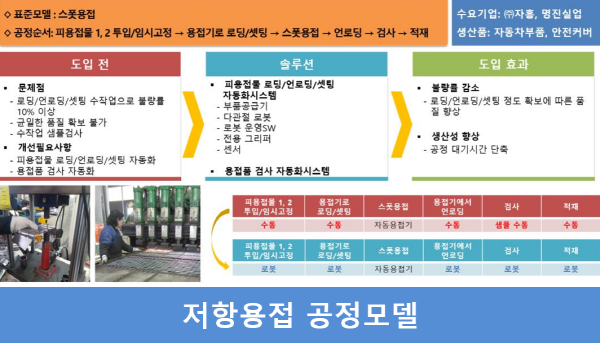
| ▲ 저항용접 공정모델 |
우선 저항용접 공정은 그동안 로딩 및 언로딩, 셋팅, 수작업으로 10% 이상의 불량률이 나왔기 때문에 균일한 품질 확보가 불가능했으며 수작업 샘플 검사도 필요했다. 이에 연구원은 부품 공급기, 다관절 로봇, 로봇운영 소프트웨어, 전용 그리퍼, 센서 등을 활용해 피용접물 로딩 및 언로딩, 셋팅을 자동화하고 용접품 검사 자동화 시스템을 도입할 계획이다. 이를 통해 품질 향상 및 공정 대기시간 단축 효과를 이룰 수 있을 것으로 보고 있다.
| |
 |
|
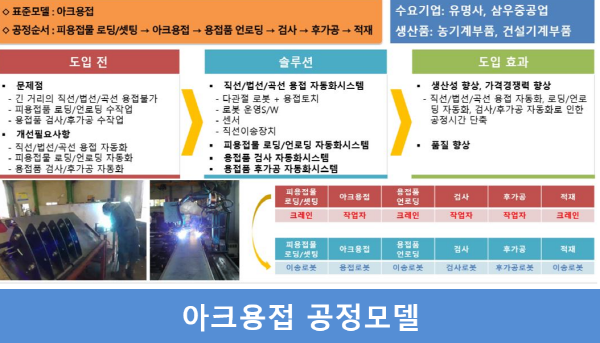
| ▲ 아크용접 공정모델 |
기존 아크용접 공정은 긴 거리의 직선·법선·곡선 용접이 불가능했고, 피용접품 로딩 및 언로딩과 용접품 검사 및 후가공을 수작업해야 했다. 따라서 용접토치가 장착된 다관절 로봇을 비롯해 로봇운영 소프트웨어, 센서, 직선이송장치를 활용해 직선·법선·곡선 용접을 가능케 하고, 로딩 및 언로딩, 검사 및 후가공 자동화를 통해 공정시간을 단축할 계획이다.
| |
 |
|
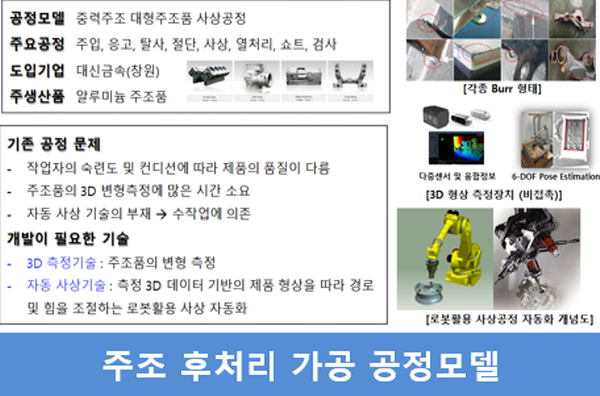
| ▲ 주조 후처리 가공 공정모델 |
주조 후처리 가공 공정도 그동안 많은 문제가 있었다. 작업자의 숙련도 및 컨디션에 따라 제품의 품질이 달랐고, 주조품의 3D변형을 측정하는 데 많은 시간이 걸렸으며, 자동사상 기술 부재로 인해 수작업에 의존했다. 따라서 주조품의 변형을 측정하는 3D 형상 측정정치를 도입하고, 측정 3D 데이터에 기반한 제품 형상을 따라 경로 및 힘을 조절하는 로봇활용 사상 자동화를 꾀할 계획이다.
| |
 |
|
| ▲ 머신텐딩 공정모델 |
이어 머신텐딩 공정은 여러 대의 가공장비나 작업 셀을 갠트리 또는 선형 이송 가이드를 통해 이동해 로딩 및 언로딩하는 공정이다. 특히 다중 가공셀 공정은 여러 대의 공작기계를 등간격, 또 직선 모양으로 배치하고, 그들을 반송 장치로 결합한 공정이다. 따라서 복합 그리퍼 및 이송계 도입및 다중 셀의 작업효율성을 고려한 최적 설계를 통해 로봇 자동화를 꾀할 계획이다.
| |
 |
|
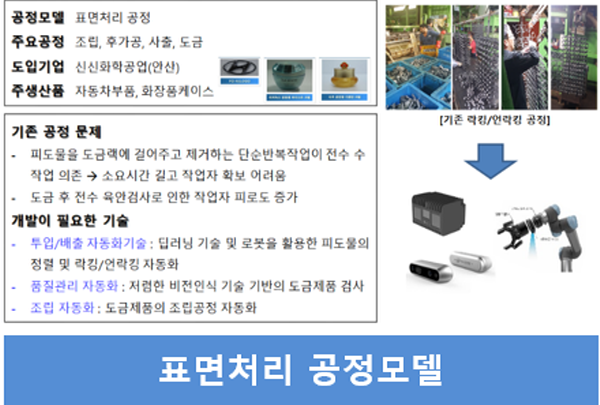
| ▲ 표면처리 공정모델 |
마지막 표편처리 공정은 피도물을 도금랙에 걸어주고 제거하는 단순반복작업이 전수 수작업에 의존하고 있어 시간이 많이 걸릴 뿐 아니라 작업자 확보에도 많은 어려움을 겪고 있다. 또 도금 후 전수 육안검사로 인해 작업자의 피로도가 증가하기도 했다. 따라서 딥 러닝 및 로봇을 활용한 피도물의 정렬 및 락킹/언락킹 자동화는 물론, 저렴한 비전인식 기술에 기반한 도금제품 검사를 통한 품질관리 자동화 및 도금제품의 조립공정 자동화를 구축할 계획이다.
한편, 연구원은 총 18개 공정모델 중, 지난해 금속 및 자동차 분야에서 2개의 수요기업을 통해 저항용접(자흥)과 정밀부품가공 머신텐딩(보은금속) 등 2개의 공정모델을 개발한 바 있다.
| |
 |
|
| ▲ 공정모델 개발사례 저항용접(자흥) |
이중 저항용접은 그동안 수작업시 저항용접 품질 불량이 다수 발생했었다. 또 단순 반복작업으로 작업자 피로도가 누적됐으며, 비주기적이고 검사정확성이 낮다는 문제점이 있었다. 따라서 이런 고위험 공정에 산업용 로봇을 도입하면 용접 품질향상 및 불량률 감소, 검사정확성 향상, 생산비 절감 및 생산성 향상, 작업자 근골격계질환 예방 등에 기여할 수 있다. 총 사업비는 약 1억 6000만원으로, 정부출연금은 8000만원 이내다.
| |
 |
|
| ▲ 공정모델 개발사례 머신텐딩(보은금속) |
머신텐딩은 작업자가 단순 반복 작업으로 인해 시력이 저하되고 반복된 중량물 취급으로 피로도 가중이 높았다. 특히 이 같은 단순반복 작업 피로 탓에 제품의 불량률이 높았고, 수작업에 따른 품질도일정치 못했으며, 가공기의 안전사고 노출위험도 있었다. 이에 협동 로봇 및 산업용 로봇을 도입하면 제품 불량률 저하로 생산성이 향상되고, 균일한 품질이 보장되며, 작업자의 직무기피 현상도 해소할 수 있다. 총 사업비는 약 3억원으로, 정부출연금은 1억 5000만원 이내다. |
















