한국기술교육대 김용재 교수팀, 새로운 로봇손 'BLT 그리퍼' 개발네어버랩스, BLT 그리퍼 기술 소개
승인 2020.06.18 11:55:28
네이버랩스와 로봇 공동 연구를 진행하고 있는 한국기술교육대 김용재 교수가 벨트(belt)와 링크(link)를 결합한 새로운 구조의 로봇손 ‘BLT 그리퍼’를 개발했다. 물건을 정밀하게 집고, 강하게 움켜쥐는 동작이 자연스럽게 이뤄진다.
김용재 교수(전기·전자·통신공학부)팀은 최근 ‘ICRA 2020(The 2020 International Conference on Robotics and Automation)’에 15자유도의 로봇손인 ‘플렉스 핸드(FLLEX hand)’ 기술을 소개해 ‘IEEE RA-L 최고 논문상(IEEE Robotics and Automation Letters Best Paper Award)’을 수상한 바 있다. 이 로봇손은 지난해 개발됐다.
네이버랩스는 현재 미국에 머무르고 있는 김용재 교수를 인터뷰하고 BLT 그리퍼 기술 개발 소식을 홈페이지를 통해 공개했다. 김용재 교수는 네이버랩스와 지난 2016년부터 산학협력을 진행하고 있으며, 로봇 팔 앰비덱스를 비롯해 사람처럼 유연하고 안전한 로봇 개발을 연구하고 있다.
김 교수가 개발한 BLT(Belt and Link actuated Transformable Adaptive Gripper) 그리퍼는 벨트(belt)와 링크(link)라는 단순한 컴포넌트의 조합으로 강력한 성능을 낼 수 있도록 설계됐다. ‘정밀한 집기(precision pinching)’와 ‘강한 움켜잡기(power grasp)’를 하나의 로봇 손으로 할 수 있다.
사람의 손은 27개의 뼈와 30여 개의 근육이 연결되어 있어 무려 23의 자유도를 갖고 있는데 로봇을 활용하는 작업 현장에서는 대부분 1~3 자유도의 로봇 그리퍼들을 필요에 따라 교체해가며 사용하고 있는 게 현실이다. 김교수는 사람의 손 구조에서 아이디어를 얻어 새로운 구조의 로봇 손을 개발했다.
▲ BLT 그리퍼를 이용해 다양한 물체를 집는 모습(사진=네이버랩스)
BLT 그리퍼는 마주 보고 있는 정밀하고 강한 손끝을 평행하게 움직여 산업용 그리퍼처럼 ‘정밀한 집기 자세’를 하고, 손가락의 벨트 부분은 다양한 형상의 물체를 감아쥘 수 있어 유연하면서도 강한 ‘움켜잡기 자세’가 가능하다. 하나의 손으로 정밀한 집기와 강한 움켜잡기를 모두 할수 있는 그리퍼들은 기존에도 몇 가지 방식들이 개발됐지만, 스스로 파지 방식을 바꿀 수 있는 로봇 손은 BLT 그리퍼가 유일하다는 설명이다.
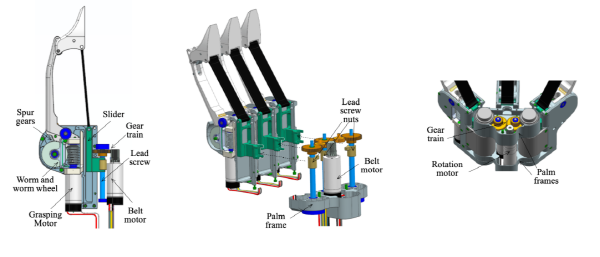
▲ BLT 그리퍼의 구조(사진=네이버랩스)
BLT 그리퍼는 3개의 손가락과 5개의 모터로 이뤄져 있으며 5자유도를 갖고 있다. 이 중 3개의 모터는 3개의 손가락을 구부리는 역할을 하며, 또 다른 하나의 모터는 3개 손가락 끝의 각도를 한꺼번에 변경해 주는 역할을 한다. 남은 하나의 모터는 양쪽의 손가락을 회전시켜서 두 손가락 집기, 세 손가락 집기, 원통형 물체 잡기 등을 가능하게 해준다. 손끝 각도를 적절히 변경하고 움켜쥐면 물체를 안쪽으로 끌어들여 자동적으로 유연하고 강한 파지를 할 수 있다.
김 교수는 벨트(Belt)와 슬롯(slot)의 조합으로 복잡한 고자유도 제어를 하지 않아도 스스로 형상에 맞게 물체를 잡을 수 있는 ‘언더-액추에이티드(under-actuated)’ 메카니즘을 구현했다고 설명했다.
김 교수는 여전히 현재 개발되고 있는 로봇들이 충격에 매우 약하다며 새로운 접근법의 필요성을 제기했다. 김 교수는 “학계에서는 머신 러닝과 데이터 기반 알고리즘을 이용하여 로봇의 성능을 빠르게 향상시키고 있기는 하지만, 기존 산업용 로봇 팔에 힘제어 기능을 추가하는 제한적인 방식으로 진행되고 있다”며 “좀 더 안전하면서 기민한 로봇을 위해서는 사람 팔처럼 극단적으로 가볍고, 사람의 손처럼 충격을 흡수할 수 있는 혁신적인 로봇 메커니즘이 필요하다”고 했다. 이를 위해 그동안 당연하게 사용해온 모터, 베어링, 회전 관절, 금속 프레임들이 최선의 선택인지 재고할 필요성이 있다고 말했다.