요즘 다른 많은 분야에서처럼 로봇 기술의 미래 역시 클라우드와 로봇간의 결합을 통해 산업현장의 생산성과 효율성을 높이는 데 있는 것으로 보인다. 이른바 클라우드 로봇공학이다. 그 세가지 핵심 기술 요소로는 속도, 즉 ‘0’에 가까운 지연 시간, 통신 연결, 고립화가 꼽혔다.
‘로보틱스앤오토메이션뉴스’는 21일(현지시각) 로봇업계와 클라우드간 상호작용성이 날로 높아지고 있는 가운데 로봇업계가 이를 활용한 최적의 성능 실현을 위해 해결해야 할 세가지 기술적 과제에 대해 주목했다.
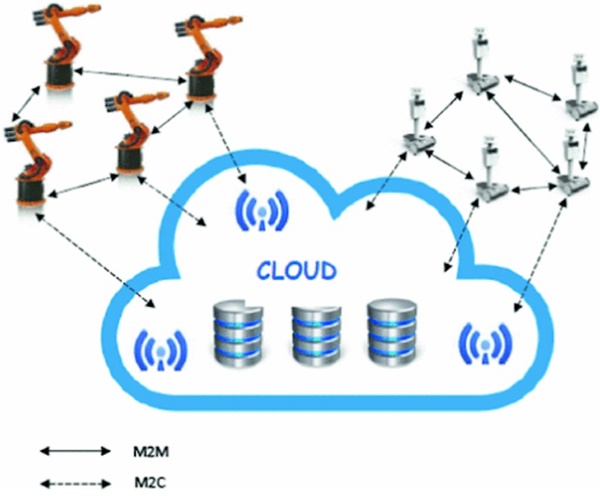
클라우드 로봇은 지난 2010년 당시 구글의 연구 과학자였던 제임스 커프너가 처음 만든 용어로서 로봇 기능을 확장하기 위한 방대한 양의 처리 능력과 저장 자원을 제공한다. 로봇과 클라우드의 융합은 로봇이 사물인터넷(IoT)과 인공지능(AI)과 같은 반열로 자주 언급되는 핫 테크놀로지 트렌드로 부상하게 만드는 주 요인이 되고 있다.
리서치앤드마켓(ResearchAndMarkets)에 따르면 올해 370억 달러(약 45조9000억 원) 규모인 전 세계 서비스 로봇 시장은 오는 2025년까지 1025억 달러(약 127조1200억 원)로 급증할 것으로 예상된다.
클라우드 로봇공학 덕분에 로봇은 이미지 인식 및 그래픽 매핑 시스템과 같은 컴퓨팅 집약적인 작업을 처리하고 새로운 기술과 소프트웨어 업데이트를 다운로드할 수 있다. 그러나 과장스러운 이상을 실현하기 위해서는 세가지 기술적 과제를 해결해야 한다. 이를 따라가 본다.
1. 속도(Speed)
사람들은 이메일과 앱을 이용한 빠른 속도에 익숙하지만 로봇에서 그 속도는 더 빨라야 한다. 예를 들어 로봇팔은 지연시간이 제로(0)인 실시간 처리를 통해 정확히 제시간에 제자리에 있어야 한다. 일부 로봇은 인간 뇌의 시냅스 속도로 작동해야 하며 클라우드 로봇 역시 그래야 한다. 시냅스는 신경 세포의 신경 돌기 말단이 다른 신경 세포와 접합하는 부위다.
늘어나고 있는 로봇 공학 관련 오픈소스 커뮤니티는 주로 두 가지 프로젝트를 통해 이 도전에 대처하고 있다. 하나는 2년 된 리눅스재단 프로젝트인 ‘ACRN’으로서 실시간 페이로드(payload)가 필수적인 로봇과 IoT 기기의 독특한 요구를 해결해 줄 ‘빅 리틀 하이퍼바이저’를 개발하는 것이다. ACRN은 자원의 제약을 받는 하드웨어에 대해 낮은 지연 시간과 통신 응답성을 강조한다.
두 번째는 또다른 리눅스재단의 프로젝트인 ‘제퍼(Zepher)’로서 여러 아키텍처에 걸쳐 IoT, 로봇 및 기타 공간 제약을 받는 기기에 사용할 수 있는 안전하고 유연한 실시간 운영 체제(OS) 구축을 목표로 한다. 이 프로젝트는 지난 3월 2.2버전을 발표했다.
비록 많은 경우 주목할 가치가 있지만, 이것은 불필요한 과잉 기능이란 지적이 나온다. 실시간 문제를 해결할 때까지 그 능력을 구현하기가 어렵고 불필요한 것으로 판명날 것이란 게 이유다. 개발자들이 실시간 기능의 틀을 벗어나 더 많은 생각을 할 수 있다면 클라우드 로봇이 제공할 수 있는 해결책과 솔루션은 많을 것이란 지적이 나온다.
2. 통신 연결성(Connectivity)
외과로봇같은 미션 크리티컬한 로봇이 갑자기 클라우드나 네트워크와의 연결을 끊을 경우 발생할 수 있는 문제를 상상하면 통신 연결성 문제의 중요성을 짐작하기 어렵지 않다.
대부분의 사람들은 이 높은 위기 상황이 몇 분 간 넷플릭스 보기를 그만 두는 것 이상의 심각한 결과를 초래할 것이란 점을 이해한다.
▲로봇업계가 실시간 서비스, 통신연결, 고립화를 통해 보다 스마트한 클라우드 로봇을 선보일 때 다양한 업체들을 지속적으로 디지털변환(Digital Transformation)시켜 나갈 수 있을 것이다. (사진=보스턴 다이내믹스)
이 문제는 여러 가지 방법으로 지속적으로 해결되고 있다. 로봇 산업을 위한 한 가지 해결책은 5G통신이다. 5G통신의 극적으로 낮아진 지연 시간과 통신 개선으로 연결성과 적절한 통신은 걱정을 훨씬 줄여줄 것이다.
문제를 해결할 또 다른 방법은 지역화된 로봇 미니 클라우드, 즉 자원 공유 클러스터를 대비책으로 설정하는 것이다. 즉, 네트워크가 다운될 경우 로봇이 자원을 계속 공유하면서 하던 작업을 지속해서 수행할 수 있도록 해주는 것이다.
이 아이디어는 이미 쿠버네티스나 마이크로k8s(Microk8s) 같은 시스템들과 함께 로봇 세계에서도 강한 유대감을 갖고 있다. 두 시스템은 컨테이너화된 애플리케이션의 자동 배치, 확장 등을 제공하는 오픈소스 기반의 관리시스템으로서 원래 구글에 의해 설계됐지만 현재 리눅스 재단에 의해 관리되고 있다. 스웜(Swarm) 로봇공학은 같은 원리를 사용하며 이는 전 세계에 걸쳐 매우 흥미로운 연구의 초점이다.
3. 고립화(isolation)
고립화는 로봇이 분별력을 잃었을 때 보안상의 이유로, 또는 로봇이 에너지 탐사나 터널 매핑작업 등으로 지하 깊숙이 묻혀 있어 네트워크에 연결할 수 없을 때 작동한다.
사실 여기서의 해결책은 클라우드 로봇공학이 아니라 또다른 측면인 엣지 컴퓨팅에 있다. 이는 클라우드에 의존하기보다는 데이터 소스, 또는 그 근처에서 컴퓨팅 작업을 실행한다.
고립 문제를 해결하려면 단지 계산 리소스를 엣지컴퓨터로 이동하면 된다. 이는 무어의 법칙에 따라 더 강력한 하드웨어가 될 수 있다. 또는 앞서 언급한 컴퓨팅 클러스터를 사용해 현지화된 리소스를 공유하는 방법도 있다. 업계가 이 3가지 과제를 극복하며 보다 스마트하고 능력 있는 클라우드 로봇을 선보일 때 다양한 산업계를 계속해서 디지털변환(Digital Transformation)시킬 수 있을 것이다.