| |
 |
|
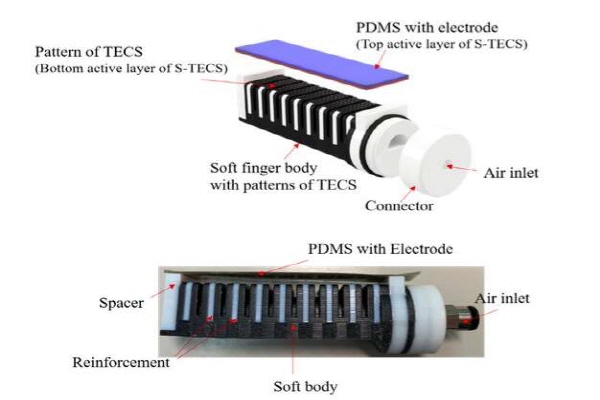
| ▲ 이번에 개발한 소프트 손가락은 단극 전위 마찰식 곡률 센서(single-electrode triboelectric curvature sensor · S-TECS)를 갖추고 있다.(사진=테크엑스플로어) |
IT 매체인 테크엑스플로어가 최근 중국 저장성 공대(Zhejiang University of Technology), 톈진대(Tianjin University), 난징공대(Nanjing Institute of Technology), 그리고 일본 리츠메이칸대(Ritsumeikan University) 등이 다중 소재(multi-material) 3D 프린팅 기술을 사용, 자체 구동 곡률 센서(curvature sensor)를 갖춘 ‘소프트 로봇 손가락’을 공동으로 개발했다고 보도했다. 이번 연구 결과는 에너지 분야 국제학술지인 나노 에너지(Nano Energy)에 게재됐다.
연구팀은 소프트 로봇이 인간과 물체, 그리고 환경 사이의 안전한 상호 작용을 확보하는 게 중요하다고 말한다. 특히 내장형 소프트 센서는 실제 응용 분야에서 잠재력을 최대한 발휘할 수 있는 제어 가능한 소프트 로봇을 개발하는 데 있어 중요하다는 지적이다. 이미 연구팀 중 일부는 물체를 강하게 잡도록 해주는 가변 강성을 갖춘 완전 다중 소재 3D 프린팅 그리퍼를 개발한 바 있다. 연구팀은 이 그리퍼로부터 아이디어를 얻어 3D 프린팅 소프트 손가락을 제작했다고 밝혔다.
이 손가락은 신축성 전극(stretchable electrode)을 포함해 폴리디메치실록산(polydimethylsiloxane·PDMS), 애질러스 블랙(AgilusBlack), 베로화이트(VeroWhite), FLX9060 등 다양한 재료로 이뤄져 있다. 구부리는 동작을 모니터링할 수 있도록 감지 기능을 갖췄고, 단극 전위 마찰식 곡률 센서(single-electrode triboelectric curvature sensor · S-TECS)를 내장했다. 이 센서 덕분에 외부 전원 없이도 작동 주파수가 매우 낮은 곳에서 손가락의 구부림 곡률(bending curvature)을 감지할 수 있다는 게 연구팀의 설명이다.
이번 연구에 참여한 ‘멍잉시(Mengying Xie)’ 연구원은 "복잡한 센서 제조 공정은 일반적으로 프로토타이핑 시간이 길어 대량 생산의 발달 가능성을 제한할 것"이라며 "불안정한 케이블 연결과 복잡한 시스템 조립은 전체 로봇 시스템의 성능을 저하시킬 수 있다. 게다가 소프트 바디와 부착된 센서 사이의 모듈들이 호환되지 않아 유연하고 가벼우면서도 작은 단위로 시스템을 통합하는 데 어려움이 따를지도 모른다”라고 지적했다.
이에 연구팀은 최첨단 다중 소재 3D 프린팅 기술을 사용해 소프트 손가락을 제작했다. 이 기술을 사용하면 한 번의 과정으로 손가락을 만드는 게 가능해 첫 프로토 타입 제작에 필요한 시간을 크게 줄일 수 있다고 소개했다.
| |
 |
|
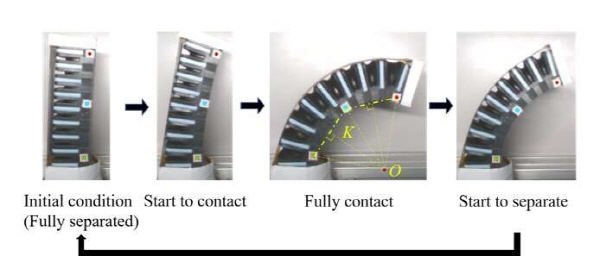
| ▲ 소프트 로봇 손가락의 작동 주기(사진=테크엑스플로어) |
테크엑스플로어에 따르면 S-TECS 센서는 기계 신호를 전기 신호로 효과적으로 변환하는 게 가능하다. 이 센서는 그동안 여러 연구를 통해 효율적인 인간-기계 인터페이스, 모션 모니터링 장치 등 여러 기술 도구 개발에 있어 전망이 있는 것으로 입증됐다.
연구팀이 사용한 S-TECS 센서는 이른바 마찰 전기(triboelectric charge)라 불리는 프로세스를 통해 작동한다. 이는 주어진 재료가 다른 재료와 분리된 후 전기가 흐를 때 접촉 대전(contact electrification)을 일으키는 과정이다. 이 같은 과정을 통해 외부 회로 내에서 전자의 자유 흐름을 유도하는 전위차(electric potential difference)를 유발한다.
멍잉시는 "우리가 개발한 내장형 센서에 있는 S-TECS의 상부 층은 신축성 전극이 있는 PDMS로 만들어졌고, 구조화된 패턴을 가진 하부 활성 층은 손가락 몸체의 표면에 직접 인쇄됐다"며 "손가락을 굽히는 동작은 S-TECS의 두 기능층 (functional layer)들 사이에 접촉해 접촉 대전을 활성화한 뒤 전기를 생성한다"라고 설명했다.
연구팀은 이번 연구에서 표면 설정, 적용된 힘, 자동화된 설정의 동작 주파수 등을 변경해 다양한 조건에서 S-TECS 센서의 성능을 평가했다. 평가 결과 센서가 전반적으로 0.06Hz의 초저 동작 주파수로 최대 8.2m-1의 손가락 곡률을 측정할 수 있다는 사실을 발견했다. 게다가 센서를 다른 소프트 재료와 통합해도 전체 로봇 시스템의 유연성과 적응성이 저하되지는 않았다는 지적이다.
이번 연구는 다중 소재 3D프린팅 기술을 사용한 S-TECS의 기능성 마찰 전기층으로 소프트 로봇 구조를 만드는 게 가능하다는 것을 보여줬다는 평가다. 연구팀은 이번에 사용한 방법이 고도의 감지 기능을 갖춘 다양한 로봇 시스템을 생산하는 데 사용될 수 있을 것으로 기대하고 있다.
멍잉시는 "이번 연구는 다중 소재 3D 프린팅이 소프트 액츄에이터는 물론 기능성 센서를 제조하는 데 사용될 수 있다는 것을 입증했으며, 이를 통해 제어 가능한 소프트 로봇 공학을 위한 간단하고 빠른 제조공정으로 향하는 길을 닦은 것이다"라며 "앞으로 이번에 개발한 S-TECS를 활용해 소프트 손가락 곡률의 폐쇄 루프 제어(closed-loop control)를 개발할 예정이다”라고 전했다. |
















