원격 의료와 로봇 기술을 결합한 ‘원격 간호 로봇(Tele-nursing robot)’ 개발이 추진되고 있다.
'IEEE 스펙트럼'에 따르면 일리노이대와 듀크대 연구진은 의료진과 환자의 감염병 위험을 줄이고 의료진의 개인보호장비(PPE) 오염 및 부족 문제를 해결할 수 있는 대안으로 원격 간호 로봇에 대한 연구를 활발하게 추진하고 있다.
원격 간호로봇은 인간 간호사가 로봇을 원격 제어하는 방식으로, 환자 생체 데이터 측정ㆍ의사 소통의약품 배송ㆍ진단및 치료ㆍ환자 이송 등 다양한 활동을 지원할 수 있는 로봇을 의미한다. 한마디로 로봇이 간호사의 눈, 귀, 몸의 역할을 하면서 환자 치료 및 케어 업무를 복합적으로 수행하는 것이다.
이 같은 로봇을 구현하기위해선 로봇 매니퓰레이션, 원격 영상회의, 증강 현실, 건강 센서, 저지연 커뮤니케이션 네트워크 기술이 뒷받침되어야 한다. 원격 간호로봇이 도입되면 간호사들은 개인보호장비의 사용 비율을 줄일 수 있으며, 사회적인 거리두기에 보다 충실하게 대응할 수 있다.
일리노이대와 듀크대 연구진은 원격 간호 로봇 기술을 구현하기 위해선 ▲커뮤니케이션(의료진과 환자간에 쌍방향 오디오 및 영상 통신) ▲이동성(입원실 내부 또는 입원실간 이동) ▲측정(진료 데이터의 수집 및 평가) ▲일반적인 매니퓰레이션(센티미터~밀리미터 이하 수준의 정밀도를 다 처리할수 있는 조작 능력) ▲도구 사용(인간 또는 로봇에 특화된 도구) 등 5가지의 기능을 충족시켜야한다고 지적한다.
연구진에 따르면 5가지 가운데 이동성이나 측정 기능은 상대적으로 다른 기능보다 구현하는게 쉽다. 로봇 R&D 측면에서 볼 때 병목이 생기는 부분은 바로 ‘일반적인 매니퓰레이션(조작)’ 기능과 도구의 사용에 관한 것이다. 일반적인 조작이 가능하려면 강력한 힘과 능숙도가 함께 지원되어야한다. 환자를 들어올릴 수 있을 정도로 강력한 힘도 있어야 하지만 다른 한편에선 정맥주사(IV)를 놓을 수 있을 정도로 세밀함을 갖추고 있어야 한다.
일리노이대와 듀크대 연구진은 최근 5년간 원격 간호로봇인 ‘트리나(TRINA·Tele-Robotic Intelligent Nursing Assistant)' 개발 프로젝트를 진행해왔다. 현재 프로토타입 개발을 끝낸 상태다. 트리나 프로젝트는 지난 2014년 에볼라 발병으로 시작됐으며 전미과학재단의 후원으로 진행되고 있다. 의료진을 위해 텔레 프레전스 기능을 갖춘 모바일 매니퓰레이션 로봇을 개발하는 것이 목표다. 음식물 및 의약품 전달, 이동 방식의 측정, 청결 및 소독 작업, 환자 생체신호의 모니터링, 환자와의 소통 등 기능을 갖추게 된다.
연구진은 트리나 로봇을 현재 실험실과 시뮬레이션 환경에서 테스트하고 있다. 최초의 버전은 듀크대에서 개발했으며 현재 일리노이대와 듀크대가 트리나 2.0을 개발하고 있다.
트리나 1.0은 원격 의료나 비숙련 육체 작업을 주로 지원하는데 반해 트리나 2.0은 정맥주사 커넥터와 같은 작은 물체를 다룰 수 있을 정도의 정밀한 조작 능력을 구현할 예정이다. 청결 및 소독 작업, 진단, 비침입적인 관여(non-invasive interventions) 등 기능이 가능하도록 한다는 계획이다.
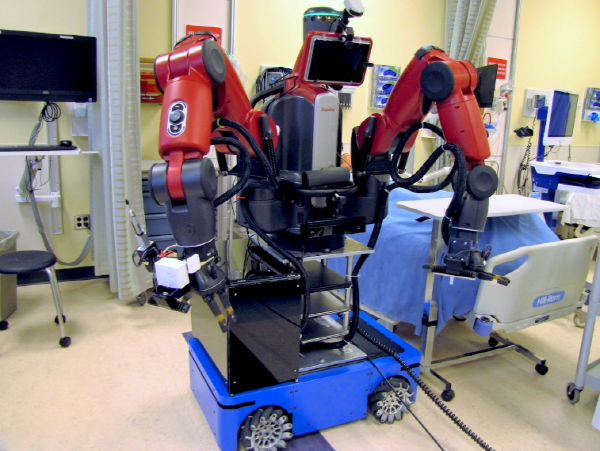
▲ 현재 개발중인 '트리나 2.0', 좁은 공간을 이동할 수 있으며 IV 커넥터 등 작은 물체를 조작할 수 있다(사진=일리노이대)
IEEE 스펙트럼에 따르면 원격 간호 로봇을 구현하기위해선 2가지 접근법이 존재한다. '직접적인 원격운영(direct teleoperation)'과 '감독적인 제어(supervisory control)' 방식이 그것이다.
직접적인 원격 운영 방식은 간호사가 원격지에서 로봇을 자신의 신체 일부인 것처럼 다루는 것을 의미한다. 고도의 몰입감을 제공해야한다. 일리노이대 연구팀은 직접적 원격 운영 방식을 트리나에 적용하는 과정에서 간호사들이 낯선 경험을 하게 된다는 점을 확인했다. 원격지에 있는 로봇을 다루는 과정에서 인간의 몸과 로봇의 몸 사이에 입출력 매핑이 정확하게 일치하지 않는다는 것이다. 훈련 과정없이 간호사들이 로봇에 몰입할 수 있는 기술을 구현하는게 쉽지 않다는 의미다. 특히 그리퍼의 정확한 제어는 매우 도적적인 과제로 인식되고 있다. 감각운동 제어의 지연에 따라 반사적인 동작이 제때 이뤄지지 못해 마치 기계팔로 인형 뽑기를 하는 것과 같은 경험을 하게 된다는 설명이다. 실제 테스트 과정에서 훈련받은 조작자들도 개인보호장구를 입은 간호사보다 50~150배 늦게 동작을 구현하는 것으로 나타났다.
감독적인 제어 방식은 간호사가 반자율 로봇의 감독자 역할을 하는 것이다. 조작자인 간호사는 로봇에게 명령을 내리고, 진전 상황을 감시하며 때로는 직접 개입하기도 한다. 간호사는 로봇의 이동 목표 지점을 정해주고, 어떤 지점에 가서 물건을 집어 사용하라고 명령을 내린다. 이 경우 로봇의 동작은 매우 느리게 이뤄진다. 로봇이 작업을 진행하는 동안 간호사는 다른 일을 처리하거나 다른 로봇을 제어할 수 있다. 여러 대의 로봇을 한번에 다룰 수 있다는 장점이 있다. 일리노이대 연구팀은 이들 방법 외에도 직접적인 운영 제어 방식에 약간의 자율성을 제공하는 접근 방법도 연구하고 있다.
일리노이대와 듀크대 연구팀은 트리나의 개발 과정에서 최종 사용자의 의견을 청취하는 게 중요하다는 사실을 확인했다. 간호사들은 특히 장비의 알람(alarm) 신호를 단번에 끌 수 있는 기능이 중요하다는 점을 연구팀에 인식시켰다. 간호사들은 그동안 여러 의료 장비를 다루면서 빈번하게 발생하는 잘못된 알람 신호 때문에 적지 않은 불편을 겪은 것으로 전해졌다. 특히 코로나19와 같은 감염병 상황에선 잘못된 알람 신호를 재빨리 끄는것 조차 쉽지 않다는 것. 만일 환자가 위치한 곳에 있는 의료 장비에 갑자기 잘못된 알람이 울리면 원격지에서 바로 끌 수 있도록 원격 간호 로봇의 기능이 사용자 친화적이어야한다는 설명이다.
환자와 밀접하게 접촉하는 원격 간호 로봇이 감염원이 되지 않기 위해선 로봇 자체의 소독 및 청결 작업도 중요하다. 연구팀은 이를 위해 로봇이 스스로 개인보호장구(PPE)를 벗을 수 있는 기술을 구현했다. 로봇이 스스로 방역복을 벗고 안정하게 처리할 수 있는 기술이다.
연구진은 원격 간호 로봇이 개발되면 단순히 감염병 상황뿐 아니라 도서 벽지 등 의료 자원이 부족한 곳에서도 활용도가 높을 것으로 보고 있다.