휴스턴 메카트로닉스, 수중 트랜스포머 로봇 '아쿠아노트' 공개NASA NBL에서 수중 테스트
승인 2019.08.02 15:25:26
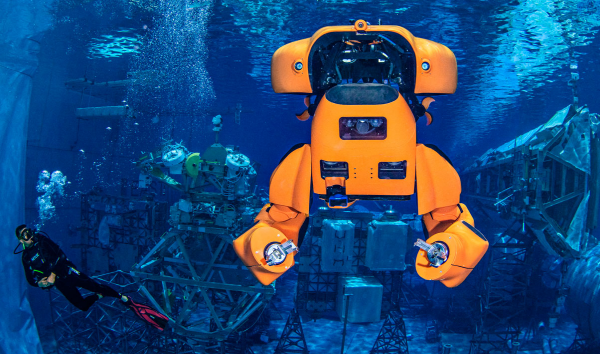
소형 잠수함에서 수중 작업용 로봇으로 변신하는 수중 트랜스포머 로봇이 공개됐다.
'IEEE 스펙트럼'에 따르면 수중 로봇 전문업체 ‘휴스톤 메카트로닉스(Houston Mechtronics)’는 NASA NBL(Neutral Buoyancy Laboratory)에서 테스트하고 있는 수중 트랜스포머 로봇 ‘아쿠아노트(Aquanaut)’을 공개했다. NASA NBL은 우주인이 우주 유영 훈련을 테스트하기 위해 만든 대형의 수조 시설이다. 최대 수심 12m에 달하며 2350만 리터의 물을 담을 수 있다.
휴스톤 매카트로닉스는 NASA에서 28년간 근무한 매트 온들러(Matt Ondler)와 레그 버카(Reg Berka) 등이 지난 2014년 공동 창업했으며 그동안 벤처캐피탈로부터 2300만 달러 이상의 자금을 투자받았다.
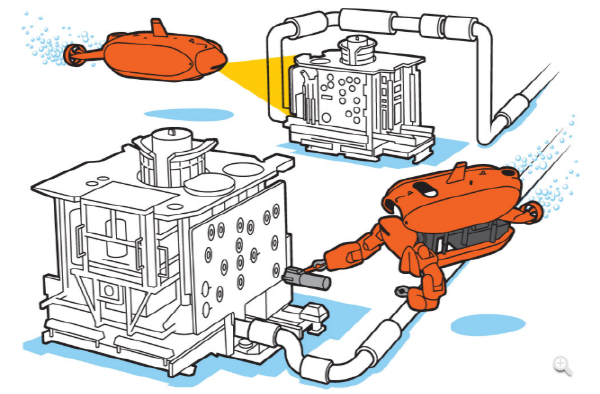
아쿠아노트는 소형 잠수함처럼 바닷속을 움직이다가 뚜껑 부분이 열리면서 휴머노이드 로봇처럼 변신한다. 수중에서 목적지까지 잠수함처럼 자율적으로 이동할 수 있으며 한번 작업시 최대 200km까지 이동 가능하다. 잠수함 모드로 이동하다가 작업물 근처에 오면 잠수부처럼 휴머노이드형 로봇으로 변신한후에 2개의 로봇팔을 이용해 섬세한 작업을 수행할수 있다. 원격조종 무인잠수정(ROV)처럼 원격 제어 방식으로 작업이 가능하다.
▲ 아쿠아노트의 변신 과정
휴스턴 메카트로닉스는 전통적인 수중 로봇의 혁신을 꾀하고 있다. 보통 수중 로봇은 자율적으로 동작하는 ‘AUV(autonomous underwater vehicle:자율무인잠수정)’와 지상에서 원격 제어하는 ‘ROV(remotely operated vehicle:원격조종무인잠수정)’로 구분할 수 있다. ROV는 로봇 제어를 위해 수상에 있는 선박과 선으로 연결되어 있는게 일반적이다. 이번에 휴스턴 메카트로닉스가 공개한 ‘아쿠아노트’는 AUV 모드로 이동하다가 작업 상황에선 ROV로 변신한다는 특징을 갖고 있다.
아쿠아노트는 힘센서와 게(claw)처럼 생긴 그리퍼를 갖춘 로봇 팔, 헤드, 수중 추진장치 등을 숨기고 있다. 헤드 부분에는 스테레오 카메라, 3D센서, 소나 시스템 등을 장착하고 있다. ‘IEEE 스펙트럼’은 아쿠아노트가 다른 수중 로봇과 달리 대형의 선박으로 이동시킬 필요없이 소형 보트에서 전개할 수 있으며 심지어 헬리콥터로 싣고 이동하다 작업 해역에 이르면 공중에서 떨어뜨리는 것도 가능하다고 소개했다. 수중 건설 작업, 수중 광산 시설 등에서 섬세한 작업을 수행할 수 있는 수중 로봇으로 활용될 수 있을 것으로 기대되고 있다.