| |
 |
|
| ▲지능형 로봇 국제공동연구사업 성과 시연회가 개최된 성균관대 자연과학캠퍼스 의과대학 대강당이 17일 참가자들로 가득 차있다. |
미래 도시 로봇은 어떤 모습일까?
성균관대 로봇공학연구소(소장 문형필 교수)와 미국 UCLA 로멜라(RoMeLa)연구소(소장 데니스 홍 교수)가 지난 17일 성균관대 자연과학캠퍼스 의과대학 대강당에서 공동으로 지능형 로봇 국제공동연구사업 성과 시연회를 개최했다.
| |
 |
|
| ▲이날 시연회에 참가한 내빈들이 행사장 입구에 마련된 포토존에서 기념촬영을 하고 있다, 사진 왼쪽부터 본지 조규남 발행인, 문전일 한국로봇산업진흥원장, 송성진 성균관대 부총장, 데니스홍 UCLA 교수, 김기준 경기도경제과학진흥원장, 최혁렬 성균관대 교수 |
이날 시연회에는 송성진 성균관대 부총장을 비롯해 문전일 한국로봇산업진흥원장, 김기준 경기도경제과학진흥원장등 내빈들과 로봇 시연 및 데니스 홍 UCLA 교수의 특강을 듣기 위해 어린 학생 및 학부모 등 500여 명이 줄을 서서 참석을 기다릴 만큼 뜨거운 분위기 속에서 진행되었다.
| |
 |
|
| ▲송성진 성균관대 부총장이 환영사를 하고 있다. |
송성진 성균관대 부총장은 환영사를 통해 "많은 어린이들과 학부모님들이 성균관대를 찾아 주셔서 감사하다"며 "멋진 로봇을 보러 왔느냐, 재미있는 로봇을 보러 왔느냐 물어본 후, 오늘 멋지고 재미있는 로봇을 보면서 미래의 꿈을 꾸는 시간이 되길 바란다고 말했다.
| |
 |
|
| ▲김기준 경기도경제과학진흥원장이 환영사를 하고 있다. |
김기준 경기도경제과학진흥원장 역시 환영사를 통해 "보다 삶의 질을 높일 수 있는 도시는 어떤 것이며, 새로운 기술을 활용한 도시는 어떤것인가를 고민하다가 3년전 이 공동연구를 지원하게 되었다"며 "성균관대 최혁렬 교수님과 UCLA 데니스 홍 교수님 두 분이 오늘 좋은 결과를 내주었다. 두 분이 연구하는 원천기술을 통해 경기도의 로봇산업이 어떻게 발전할 수 있을지, 발전하기 위해서 경기도가 해야 할 일이 무엇인지 보다 심도있게 고민하고 발전할 수 있도록 큰 지원을 해나가겠다고 말했다.
| |
 |
|
| ▲문전일 한국로봇산업진흥원장이 축사를 하고 있다. |
문전일 한국로봇산업진흥원장은 축사를 통해 "한국과 미국의 대학이 서로 협력해 혁신적인 협업을 한다는 것이 쉬운 일이 아닌데 오늘 좋은 성과를 내어 축하드린다"며 "이 기술들이 조금 만 더 노력하면 우리가 일상생활에서 쓸 수 있는 쓰임새 있는 기술이 될 수 있다. 정부가 추진하고 있는 스마트 시티 선도 시범 도시에 적용될 수 있도록 완성적이고 지속적인 연구를 부탁 드린다고 말했다.
이날 시연회에서는 경기도가 지난 2016년부터 올해 5월말까지 3년간 35억 원을 투자해 추진한 ‘지능형 로봇 국제공동연구개발 사업’의 결과물인 4족 보행 로봇 아이딘-6(AiDIN VI : Artificial DIgitigrade for Natural environment)와 4족 및 2족 보행이 가능한 하이브리드 보행 로봇 알프레드(ALPHRED : Autonomous Legged Personal Helper with Enhanced Dynamics) V2를 선보였다. 이 두 로봇은 성균관대와 UCLA가 꿈꾸는 미래도시의 로봇으로 경기도의 미래형 도시, 판교 제로 시티(Zero City)에 활용하는 것이 목표다.
| |
 |
|
| ▲성균관대 문형필 교수가 공동연구사업 소개를 하고 있다. |
성균관대 문형필 교수는 공동연구사업 소개를 하면서 우리가 생각한 로봇은 쉽고 안전하고 경제적이며 개방적이고 도시에서 쓸모있는 지능형 멀티 모달 보행 로봇이었다고 소개했다. 따라서 스마트 도시, 제로 시티에서는 빠르고 민첩하면서 다양한 서비스가 가능한 도심속 장애물을 극복하는 네 발 달린 로봇을 개발하게 되었다고 배경을 설명했다.
| |
 |
|
| ▲성균관대 최혁렬 교수가 아이딘-6가 이끄는 마차를 타고 시연무대로 입장하고 있다. |
아이딘-6(AiDIN VI)는 성균관대 로봇공학연구소에서 꾸준하게 연구해 온 보행로봇 AiDIN 시리즈의 여섯번째 모델이다. 힘을 느낄수 있는 액추에이터를 장착하여 마치 살아있는 동물처럼 바닥을 느끼면서 안정적으로 걸을 수 있고, 사람과 안전하게 하이파이브도 할 수 있다.
| |
 |
|
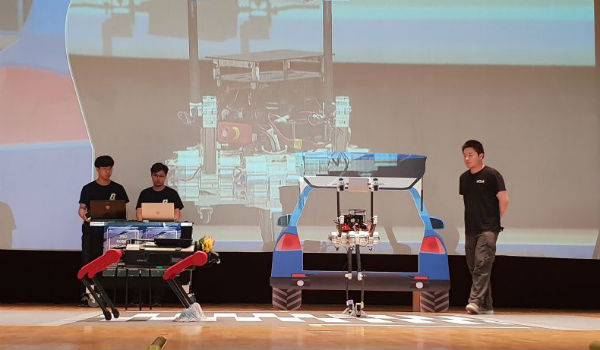
| ▲다양한 퍼포먼스를 펼치고 있는 아이딘-6 블루와 레드 로봇 |
그리고 강력한 힘을 지니고 있어 사람이 탄 수레를 끌거나 물건을 싣고 옮기는 것도 가능하다. 아이딘은 이러한 기능을 이용하여 사람들의 어려움을 도와주고 위험한 일은 대신하는 미래 도시의 로봇, 사람을 위한 로봇을 목표로 하고 있다.
| |
 |
|
| ▲4족 보행 로봇 '아이딘-6(AiDIN VI)' |
모터방식으로 연속 1시간 정도 운영이 가능하다. 시간당 3km 주행이 가능하며, 무게는 35kg으로 15kg의 화물을 적재할 수 있다. 센서통합PCB, BLDC모터, 모터하우징, 감속기, 토크센서, 절대위치엔코더, CRB포함 하우장 등이 들어 있는 머슬팩을 장착하고 있다.
| |
 |
|
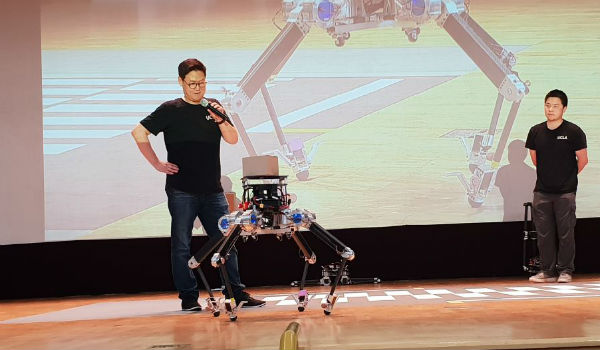
| ▲ UCLA 로멜라 연구소 데니스 홍 교수팀이 개발한 알프레드 V2 |
알프레드(ALPHRED) V2는 여러가지 방법으로 작동이 가능한 멀티 모달(Multi Modal) 로봇이며, 알프레드1의 발전된 로봇이다. 4개 다리가 대칭적인 구조이며, 주변의 상황에 따라 다리 또는 팔로서 사용이 가능하다. 전통적인 서보를 RoMeLa 만의 액추에이터, 베어(BEAR:Back-drivable Electromagnetic Actuator for Robots) 모듈로 대체한 것이 특징이다. 몸이 뒤집힌 상태에서도 보행이 가능하고, 동시에 자기 몸 높이 이상(1m 이상)을 점프해서 착지할 수도 있다.
| |
 |
|
| ▲아이딘과 알프레드 로봇의 공동 퍼포먼스 모습 |
이날 시연회에서는 두 로봇이 무대에 나와 다양한 연기를 선보여 참석한 어린이들과 학부모들의 환호와 박수를 받기도 했다. 합동 시연 무대에서 데니스 홍 교수는 그동안 개발한 다양하고 기발한 로봇들을 소개하기도 했다.
| |
 |
|
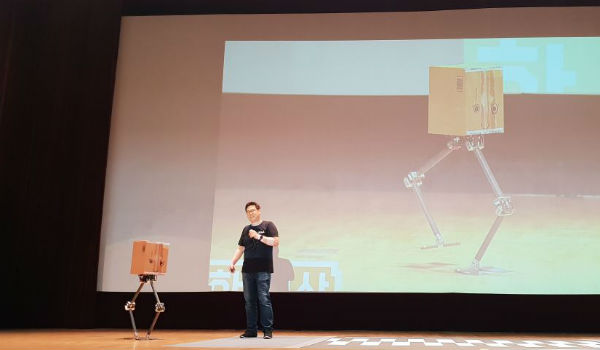
| ▲NABi(Non Anthropomorphic Biped) 로봇 |
| |
 |
|
| ▲알프레드 V1 로봇 |
홍 교수는 기존의 2족 휴머노이드 로봇은 아직 안정적이지 못하고 너무 느리고, 비싸고, 복잡하고, 아주 위험하기 때문에 그렇지 않은 로봇들이 무엇일까를 고민하면서 다양한 보행 기술을 연구해 NABi(Non Anthropomorphic Biped) 로봇과 멀티 모달 로코모션 로봇인 알프레드를 개발하게 되었다고 설명했다.
| |
 |
|
| ▲UCLA 데니스 홍 교수가 알프레드 로봇에 대해 소개하고 있다. |
홍 교수는 시연회 및 특강에 참여한 어린이 및 학부모에게 로봇 연구를 하면서 많은 실패들도 있었지만 이를 통해 3가지 교훈을 얻었다며 첫째, "긍정은 언제나 길을 찾는다"며 문제 해결의 자세, 삶의 자세가 중요하다고 말했다. 둘째로는 "로봇이 망가지지 않으면 배울 수 없다"며 실패를 두려워 하면 도전할 수 없다고 말했다. 홍 교수는 오늘 발표회를 하기 2일 전에 열심히 만들어 테스트 하던 로봇이 반으로 부서지면서 또 한가지 교훈을 얻었다며 세번째로 "발의 걸림돌이나 발의 디딤돌이나 다 같은 돌이다"라며 위기를 기회로 실패에서 배울 수 있다고 말했다. 그는 시연회에서 2일전 갑자기 망가져 버린 로봇을 이용해 또 다른 방법을 찾은 로봇 모습을 보여줘 큰 박수를 받기도 했다.
| |
 |
|
| ▲알프레드 V2 시연 모습 |
이번 과제를 수행한 최혁렬 성균관대 교수는 본지 인터뷰에서 4족 보행로봇을 선택한 이유로 "4족 보행이 그래도 보행 로봇중에는 실용화 할 수 있는 로봇의 카테고리가 아닌가 생각한다."며 "4족 보행 로봇은 걷는것 뿐만 아니라 약간의 매니퓰레이션 조작을 할 수 있는 기능까지 포함되어 있기 때문에 '멀티 모달 레기드 로코모션 로봇(Multi Modal Legged Locomotion Robot)'이라고 한다.
| |
 |
|
| ▲성균관대 로봇공학연구소 연구원들이 모두 나와 인사를 하고 있다. |
현재 상용화되고 있는 물류 로봇들은 바퀴로 주행하는데 현실적으로 도로에서 턱을 넘을 수가 없어 사용이 불가능하다. 2족 보행 로봇의 경우 팬시하기는 하지만 옆에 있으면 사람들이 넘어져서 다칠까봐 무서워하지만, 4족 보행 로봇은 기본적으로 안정적이고 서비스를 잘 할 수 있는 로봇이다"고 말했다.
| |
 |
|
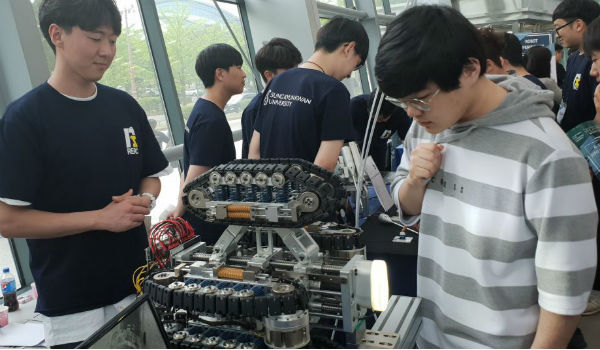
| ▲행사장 입구에 마련된 체험장에서 참가자들이 로봇을 체험해 보고 있다. |
최 교수는 "4족 보행 로봇을 개발한 이유는 현재 환경에서 수정없이 계단이나 사무실 등을 마음대로 다닐 수 있는 목적으로 만든것이 4족 보행 로봇이고 결국 아웃도어 환경에서 어느 경우에도 쓸 수 있다는 것이 가장 큰 장점이다"라고 말했다. 그는 "우리는 쓸수 있는 로봇, 견고하고 튼튼한 플랫폼을 만들어 냈고, 여기에 들어가는 소프트웨어 기술이나 부품 등을 전부 국내 연구자들에게 오픈할 수 있는 준비가 되어 있다. 그래서 4족 보행 로봇을 연구하시는 분들이 돈 낭비할 필요없이 처음부터가 아닌 여기서부터 연구를 시작했으면 좋겠다."고 말했다.
| |
 |
|
| ▲행사장 입구에 마련된 체험장에서 참가자들이 로봇을 체험해 보고 있다. |
최 교수는 이 기술을 가지고 스타트업을 만들어 세트부터 부품까지 상용화 해 국내 4족 로봇 기술 수준을 한 단계 끌어 올리는데 기여했으면 좋겠다는 바램을 밝히기도 했다.
| |
 |
|
| ▲행사장 입구에 마련된 체험장에서 참가자들이 로봇을 체험해 보고 있다. |
데니스 홍 교수는 "궁극적으로는 미래에 2족 보행 휴머노이드 로봇이 모든 것을 할 수 있다면 더 없이 좋지만 갈길이 멀고 비싸고 복잡하고 넘어지고 아직 아니다. 그래서 가까운 미래에 사용하기에는 4족 보행 로봇이 현재로는 최적의 솔루션이라고 생각한다."고 말했다. 홍 교수는 "가정내에서 강아지가 갈 수 있는 곳은 4족 보행 로봇이 다 갈 수 있다."며, "특히 우리가 개발한 로봇은 멀티 모달 로코모션 형태로 4족으로도 갈 수 있고 2족으로도 갈 수 있으며, 굴러 갈수도 있다는 것이 가장 큰 장점"이라고 이야기 했다.
| |
 |
|
| ▲행사장 입구에 마련된 체험장에서 참가자들이 로봇을 체험해 보고 있다. |
|
















