MIT, 점토 인형ㆍ초밥 만들 수 있는 로봇 기술 개발학습 기반 ‘입자 시뮬레이터(particle simulator)’ 기술 활용
승인 2019.04.22 15:01:36
사람은 손을 능숙하게 움직여 점토 인형이나 초밥을 빨리 만들 수 있다. 하지만 로봇은 그렇지 못하다. 너무 과한 힘을 줘 점토나 초밥 재료(밥)의 모양을 뭉개버린다. 물체의 성질에 맞게 적당한 힘을 주지 못하고 원하는 형태를 만드는데도 실패한다.
‘MIT 뉴스’에 따르면 MIT 컴퓨터과학 및 인공지능연구소(CSAIL) 연구진은 딱딱한 물체뿐 아니라 액체, 부드러운 물체를 다루고 형상을 만들어낼 수 있는 학습 기반의 ‘입자 시뮬레이터(particle simulator)’를 개발했다고 밝혔다. 이 시뮬레이터 기술을 활용하면 보다 섬세한 산업용 로봇이나 개인용 로봇을 제작할 수 있다는 설명이다.
기존의 학습 기반 시뮬레이터는 딱딱한 물체에 특화되어 있어 액체나 부드러운 물체를 다룰 수 없는 한계를 지니고 있다.
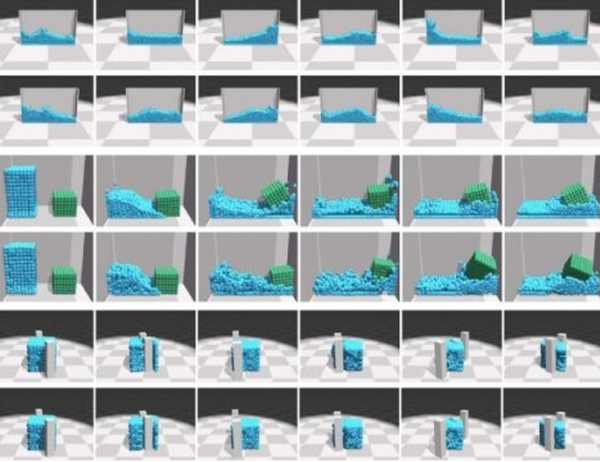
MIT 연구진이 개발한 기술은 다른 성질을 갖고 있는 물질(입자들)을 외부에서 찌르면 어떻게 반응하는 지를 시뮬레이션한다. 연구팀은 두 개의 손가락으로 이뤄진 로봇 핸드인 ‘라이스그립(RiceGrip)’을 제작해 부드러운 물체를 이용해 T자 모양 등 다양한 형태를 만드는 테스트를 진행했다.
이 기술은 입자 상호 작용 네트워크인 ‘DPI-넷츠(Nets)’ 모델을 활용하고 있다. DPI-넷츠는 입자의 복잡한 행동을 포착할 수 있는 수많은 노드(nodes)와 엣지(edges)의 다이나믹한 상호작용 그래프를 만들어낸다. 이들 그래프들은 ‘그래프 신경망(graph neural network)’으로 불리는 머신러닝 시스템의 기초를 이루고 있다. 머신러닝 시스템을 통해 로봇은 서로 다른 성질의 물체에 대해 반응하고 원하는 형태(target shape)를 만드는 방법을 훈련한다.