콜로라도대, 관절 형태 바꿀수 있는 보행 로봇 개발‘IEEE 로보틱스 &오토메이션 레터스’에 연구 성과 기고
승인 2019.03.05 17:19:06
미 콜로라도주립대학 연구진이 관절의 형태를 변형해 새로운 동작을 수행할 수 있는 보행 로봇을 개발했다고 ‘IEEE 스펙트럼’이 보도했다. 변형된 관절을 이용해 점핑을 하거나 자세를 변경해 장애물을 통과할 수 있다.
미 콜로라도주립대학 ‘어댑티브 로보틱스 랩‘의 ‘지안궈 자오(Jiangguo Zhao)’ 교수팀은 플라스틱과 실리콘 소재로 만든 로봇의 관절 형태를 바꿔 특정 동작에 유리하게 만들 수 있는 보행 로봇을 개발하고 전문 저널인 ‘IEEE 로보틱스 & 오토메이션 레터스’에 연구 논문을 게재했다. 연구진이 개발한 ‘형상 변경 관절(SMJs:shape morphing joints)’은 전기를 통하면 딱딱한 관절이 부드럽게 변하고, 이 상태에서 전기를 끊으면 딱딱한 형태로 고정된다.
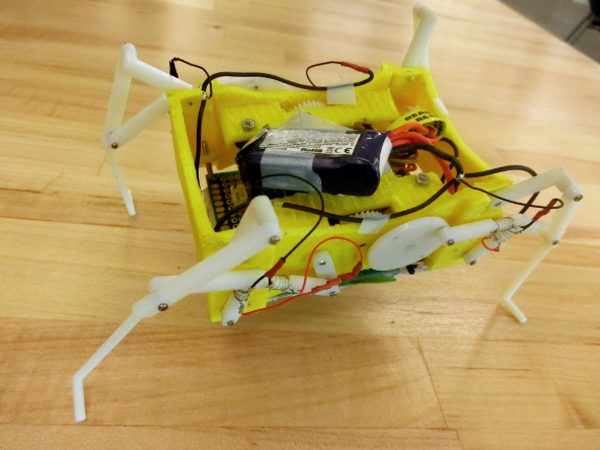
▲ 보행 로봇의 관절 형태를 바꿀 수 있다.
연구진이 공개한 동영상에 따르면 보행 로봇은 처음에는 설치된 장애물을 돌파할 수 없지만 관절의 형태를 바꾸는 방식으로 장애물 하단으로 통과할 수 있다. 마치 사람이 림보(limbo) 게임을 하는 것처럼 자세를 낮춰 긴 막대기 밑을 통과한다. 연구팀은 기본적인 메카니즘의 변화 없이 여러 가지의 SMJs를 활용해 환경 변화에 맞춰 로봇의 형태를 바꿀 수 있다고 설명한다.
지안궈 자오 교수는 IEEE 스펙트럼과의 인터뷰에서 동물들은 몸에 있는 여러 근육을 이용해 다양한 동작이나 기능을 수행하지만 로봇은 그렇지 못하다며 이번에 개발된 로봇은 로봇의 메카니컬 구조에 변화를 주는 방식으로 복합적인 동작을 수행할 수 있다고 설명했다.
이번에 확보한 기술을 활용하면 향후 환경 변화에 따라 보행 형태를 바꿀 수 있는 로봇, 공기 역학의 변화에 대응할 수 있는 비행 로봇 등 복합적인 형태의 이동(multimodal locomotion) 기능 구현이 가능해진다고 덧붙였다.