|
대한의료로봇학회(회장 이병주 한양대 교수)가 오는 20일 오전 9시부터 서울 신촌 세브란스병원 의대 131강의실에서 제9회 대한의료로봇학회 학술대회를 개최한다.
올해 학술대회는 오전 9시 20분 개막식을 시작으로 오럴 세션1, 초청 강연, 포스터 티저 및 포스터 발표 세션이 열리고, 오후에는 초청 및 기조강연, 젊은 연구자(Young investigator) 세션, 기조 강연 및 오럴 세션2 , 시상식 및 폐회식 순으로 행사가 열린다.
| |
 |
|
| ▲유연 원격 내시경 수술로봇 시연 모습 |
이날 기조강연에는 KAIST 권동수 교수와 KAIST 박형순 교수가 '유연내시경 수술로봇', 'Refining engineering methods for effective neurorehabilitation'을 주제로 각각 강연을 펼친다. 초청 강연으로는 고려대학교병원 최혁순 교수가 '소화기 내시경 분야의 의료로봇 적용', 연세세브란스병원 나군호 교수 'Future of Surgical Robotics 2018', 서울대학교병원 황순정 교수가 '치과영역에서의 로봇 수술'을 주제로 발표할 예정이다.
젊은 연구자 세션에서는 부산대 진상록 박사가 '단일경 수술을 위한 와이어 구동 수술 로봇의 실시간 제어', KAIST 김준환 박사가 'A suction-fixing and stiffness-tunable organ manipulation device for Iaparoscopic surgeries', 전남대 김우영 박사가 '근 골격계 골절 정복 수술 로봇을 위한 휴먼-로봇 인터랙션', 한양대 윤현수 박사가 '영상유도 부비동 수술로봇 시스템의 개발'을 주제로 각각 새로운 연구를 발표한다.
한편 이번 학술대회에서는 총 24편의 구두 및 포스터 논문 등 의료 로봇 분야의 다양한 논문들이 발표될 예정이다.
| |
 |
|
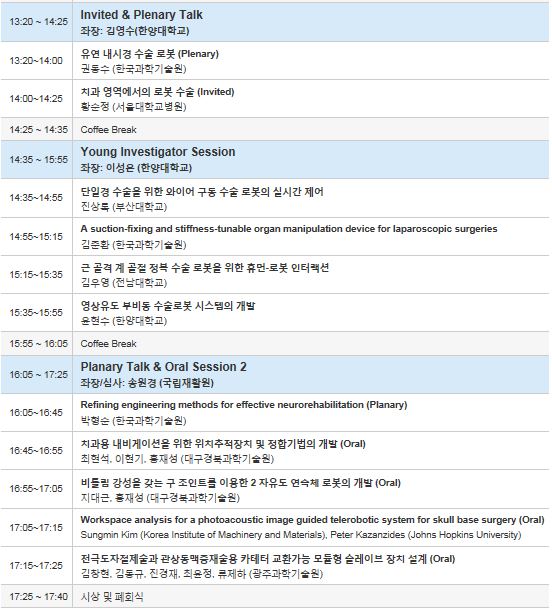
| ▲ 학술대회 프로그램 |
|


















