|
| |
 |
|
| ▲ 图片:m3-0 |
MAROROBOTTECH Co.,Ltd.(总经理:金德根)成立于2008年,是韩国工业机器人企业。其主要产品有:以智能物流机器人‘M3’为代表的三轴定位半导体检测设备‘R-PASS’、表面电阻测量设备和控制板等。
MaroRobottech已经完成了二维码智能物流机器人'M3'的开发,并从去年开始正式运营生产。现在为韩美药品(株)的子公司 JVM和无尘室公司ASE Korea提供产品。
| |
 |
|
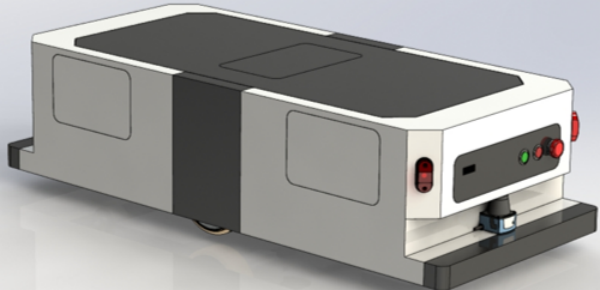
| ▲ 图片:M3-1000(1TON) |
M3是物流机器人,可识别二维码,辨别机器人的方向和位置,无需外部调控即可独立完成操作。也可以由外部计算机进行操控。通过扫描二维码而实现的定位信息提取技术与原有的 Landmark方式相比,可以提供更为精准的定位和导航功能。但要防止附在地板上的二维码不会被物流仓库或工厂内的叉车及人员造成损坏。
去年发布的M3机器人能够搬运重达200公斤到400公斤的物体,而今年新发布的M3载重已达1吨。平均移动速度为30米/分钟,最高速度可达48米/分钟。同时支持Wi-Fi,无负载情况下最长运行时间为12至15小时。
它可使用Wi-Fi无线互联网进行远程控制,可以独立使用,也可以作为网络集成管理使用。光电传感器是基本配置,雷达或保险杠传感器可以选择性安装。
M3物流机器人的优势在于,不在指定路线上的用户可以通过指定路线来运行。原有的物流机器人采用舌簧方式,其局限性是只能在特定空间中移动,但是M3物流机器人的用户可以通过扫描二维码的方法自行设置路径。
将多台M3机器人投放到工厂中,可以同时进行操控,也可以独立作业。M3控制软件支持空间地图编辑功能、二维码标签编辑功能、不同IP机器人管理功能、机器人状态实时确认功能等。
| |
 |
|
| ▲ 图片:机器人安装在韩国坡州的ACE工厂 |
MaroRobottech在2016年中国广州物流展览会上展示了智能物流机器人,积极促进国际市场的拓展。特别是在“中国制造2025”政策扶持下,中国产业机器人市场发展迅速。因此,MaroRobottech对中市场极其关注。
另一方面,Maro Robottech通过与IOSOFT的技术合作,除M3外,还生产三轴定位半导体检测设备、表面电阻测量设备和控制板等。探测仪多样化,提供了比通过XYZ轴的移动实现3D演示等更为便利的使用环境和更为准确的数据。
此外,Maro Robottech还拥有其他领域的相关技术,如开发具有障碍物识别功能的无人机等。其员工的75%为开发人员,开发能力,由此可见一斑!
| |
 |
|
| ▲ 图片:M3下架并抬起物体 |
* 본 기사는 로봇신문 중국 협력 매체인 중국로봇망에 게재된 기사입니다.
( 원문 링크 : http://www.robot-china.com/news/201809/14/53298.html ) |
















