|
'젊은 로봇공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
열여섯번째 인터뷰는 미국 애리조나주립대 이형래 교수다. 2002년 서울대에서 기계항공공학으로 학사, 2004년 기계항공공학으로 석사, 2013년 5월 미국 MIT에서 기계공학으로 박사학위를 받았다. 2004년 2월부터 2006년 6월까지 LG전자에서 연구원으로 근무하면서 모바일 핸드세트를 개발했다. 2006년 7월부터 2008년 8월까지 KIST(한국과학기술연구원)에서 연구 과학자, 2010년 9월부터 2012년 9월까지 미국 재향군인회병원 연구조교, 2013년 8월부터 2015년 6월까지 노스웨스턴대학교 시카고재활연구소 박사후 연구원을 거쳐, 2015년 7월부터 현재까지 애리조나주립대 조교수로 재직중이다.
주요 연구 및 관심분야는 물리적 인간로봇 상호작용, 시스템 다이내믹 및 제어, 뇌공학, 신경운동 제어, 재활 분야 등이다.
LG전자 장학생, 서울대 브레인코리아 21 장학생, KIST 최우수연구 프로젝트상, KIST 최우수 연구팀상을 비롯해 서울대 최우수 장학생상, 삼성 이건희 장학생, IEEE RAS Bio Rob 2012 최우수 학생논문상, SARAH BASKIN 최우수논문상, 2018 UR 주목할만한 논문상 등을 수상했다.
Q. 연구실 이름이 Neuromuscular Control and Human Robotics Lab인데 간단한 연구실 소개 부탁 드립니다.
근골격 제어 및 인간 로봇 연구소(Neuromuscular Control and Human Robotics Laboratory)은 애리조나주 피닉스 지역에 위치한 애리조나주립대(ASU) 공과대학(Ira A. Fulton Schools of Engineering) 소속으로, 2015년 가을에 설립된 비교적 신생 연구 그룹입니다. 현재 저를 비롯해 10명 남짓의 대학원생들 및 학부생들이 운동제어이론(Human Motorcontrol), 물리적 인간-로봇 상호 작용(pHRI:Physical Human-Robot Interaction) 및 로봇 신경 재활(Robot-Aided Neurorehabilitation)의 분야에서 함께 배우고 연구하고 있습니다. 관심 연구 분야가 다학제적인 특성상 연구실 구성원은 기계 공학, 의공학, 그리고 전기공학의 세 학과 소속으로 이루어져 있습니다.
| |
 |
|
| ▲ A: ASU Tempe 캠퍼스 전경, B: 실험실 학생들과 함께 |
Q. 주요 관심분야 및 연구분야가 운동제어이론, 물리적 인간-로봇 상호 작용, 로봇 신경 재활입니다. 연구분야에 대한 의미 소개와 관련 연구분야의 최근 동향에 대해 설명 부탁 드립니다.
운동제어이론은 신경 과학의 한 세부 분야로서 인간이 주변의 다양한 환경과 물리적 상호작용을 하는 가운데 우리의 신경 근골격계 (Neuromuscular system)가 어떻게 반응하고 작동하는지에 대해 이해하고자 하는 학문입니다. 저희 연구실은 로보틱스, 제어 및 측정 기술을 활용해 운동제어이론에 대한 이해를 증진시키고, 이를 바탕으로 물리적 인간-로봇 상호작용을 개선하고자 합니다. 궁극적으로 뇌졸중(Stroke), 다발성 경화증(Multiple Sclerosis)등과 같은 신경 질환을 가진 환자들의 운동 기능 회복을 위한 로봇 기술을 개발하고 제공함으로서, 전체적인 신경 재활 프로그램의 효용성 및 효율성을 높이고 환자들의 삶의 질 향상에 기여하는데 연구 목표를 두고 있습니다. 로봇 신경 재활은 최근 로봇 기술의 발전과 보급화를 기반으로 빠르게 성장하고 있는 분야로서, 미국, 유럽을 비롯한 세계 각국에서 활발하게 연구를 진행하고 있으며, 뇌졸중 환자의 상지 재활을 비롯한 일부 영역에 있어서 로봇 신경 재활이 추천되고 있습니다.
Q. 최근 하고 계신 연구를 소개해 주시면 감사하겠습니다.
로봇에 기반한 신경 재활에 대한 다양한 접근 방식이 있지만, 저희 연구실은 환자 및 건강한 사람의 운동 능력에 대한 보다 정확한 이해, 정량화 및 진단이 운동 재활 치료에 선행되어야 한다고 믿고 있습니다. 이를 위해 사람과 안정적으로 그리고 안전하게 물리적 상호작용이 가능한 로봇 장비들을 개발, 사용하고 시스템 식별 기술을 응용하는 연구 방식을 주로 사용하고 있습니다.
| |
 |
|
| ▲ 연구에 사용된 로봇 장비들 |
이 접근 방식은 기존의 의료진에 의해서 수행되었던 주관적인 측정, 진단 방식에 비해 더욱 객관적이고, 정확한 환자 상태 파악 및 진단을 가능하게 하고, 이러한 정보는 재활치료의 각 단계나 과정에 있어 효율적인 운동 치료의 선정 및 수행을 가능하게 해줍니다.
특히, 운동제어에 있어서 중요한 역할을 하는 근골격계의 임피던스를 정량화하고, 이의 기저 메커니즘을 파악하는 것을 주요 연구 주제로 하고 있습니다. 임피던스는 여러 시스템간의 에너지 교환을 설명하는 중요한 개념으로, 안정성이나 성능 등 물리적 상호작용의 다양한 측면에 대한 정보를 제공해 줍니다.
| |
 |
|
| ▲ 운동제어이론과 근골격계의 임피던스에 대한 간단한 개념도 |
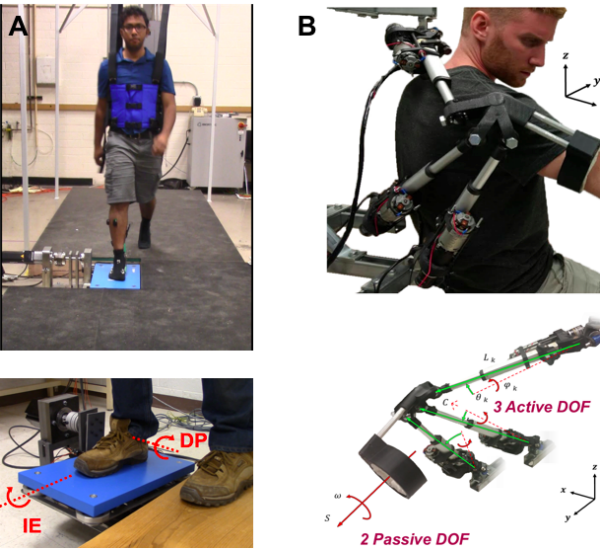
최근에 저희 연구실에서는 사람의 발목 및 어깨 관절의 임피던스를 측정하기 위한 로봇 장비를 개발하고, 이를 사용해 다양한 운동 상태(정적 및 동적 운동)에서 임피던스가 어떻게 제어되는지를 정량화 하는 연구를 수행 중입니다.
| |
 |
|
| ▲ 발목 (A)과 어깨 (B) 임피던스 측정을 위한 로봇 장비 |
기존의 많은 연구가 관절의 단자유도, 정적 특성을 단일한 물리적 환경에서 측정한 반면, 저희 연구팀은 관절의 다자유도, 동적 특성을 다양한 물리적 환경에서 측정함으로서, 임피던스가 자연스럽고, 일상적인 움직임, 운동 환경에서 어떻게 제어되는지를 연구하고 있습니다. 해당 연구결과는 물리적 인간-로봇 상호작용에 있어 중요한 문제인 안정성(stability)과 성능 (performance) 사이의 균형(tradeoff)을 최적화 하고, 나아가 환자 맞춤형, 환자 적응형 로봇 신경 재활을 구현함으로서 신경 재활의 효용성 및 효율성을 높이는데 기여할 것으로 예상합니다.
Q. 서울대 기계항공공학과에서 학사, 석사학위를 받고 MIT에서 박사 학위를 받으셨는데 박사 학위 논문이 ‘Quantitative Characterization of Multi-Variable Human Ankle Mechanical Impedance’ 입니다. 간단한 소개 부탁 드립니다.
박사 연구는 The Eric P. and Evelyn E. Newman Laboratory for Biomechanics and Human Rehabilitation에서 MIT 기계공학과 및 뇌인지과학과 소속으로 계신 네빌 호간(Neville Hogan) 교수님 지도 아래 수행하였습니다. 앞서 언급했지만, 운동 제어에 있어서 중요한 개념인 근골격계의 임피던스에 관심을 가지고, 특별히 자세 제어 및 보행을 포함한 하지 운동에 있어서 아주 중요한 역할을 하는 발목의 임피던스(ankle impedance) 정량화에 대한 연구를 수행하였습니다. 발목의 2자유도를 정확하게 제어 가능한 착용형 로봇과 다자유도 시스템 식별(multi-input multi-output system identification) 기법들을 결합하여, 발목의 다자유도 임피던스를 정량화 함으로서 기존의 단 자유도 연구에서는 얻을 수 없었던 중요한 결과들을 얻었습니다.
| |
 |
|
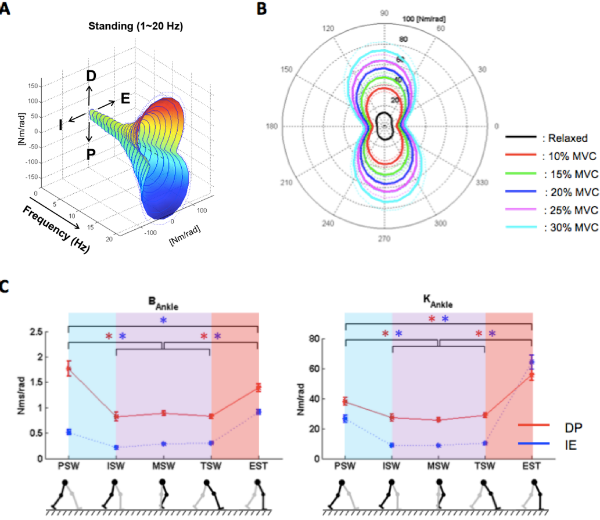
| ▲ 발목 임피던스 연구의 주요 연구 결과 A: 주파수 영역에 따른 임피던스 변화, B: 다양한 근육 활성화 정도에 따른 임피던스 변화, C: 보행 상태에 따른 임피던스 변화 |
박사 연구는 현재 애리조나 주립대에서 진행하고 있는 주요 연구, 즉 다양한 운동 조건 및 물리적 환경 조건에서 다자유도 임피던스가 어떻게 제어되고 이의 기저 메커니즘은 무엇인지를 밝히는 연구의 중요한 근간이 되었습니다.
Q. 로봇을 이용한 신경재활 분야는 현재 재활의학 분야에서 많이 사용되고 있는데 앞으로의 기술이나 시장을 전망해 주신다면...
전세계적으로 고령화되는 추세이고, 이에 따라 다양한 신경 질환을 가진 환자 수도 늘어나기 때문에 신경 재활에 대한 수요가 증가하고 있습니다. 이러한 상황에서 신경 재활의 효용성 및 효율성을 높이는 것이 중요 이슈인데, 로봇 신경재활이 이에 도움을 줄 수 있다고 많은 사람들이 의견을 함께 하고 있습니다. 실제로 상지에 대한 로봇 재활 치료가 의료계에서 인정 받기 시작했고, 최근 미국내 의료 기관 및 정부 기관으로 부터 추천되었습니다. 아직 하지에 대한 로봇 재활 치료는 추천 단계에 이르지 못했지만 하지 연구는 사람-로봇-주변 환경의 복잡한 상호작용을 수반하는 특성상 상지 연구에 비해 복잡도가 높은 경우가 많다고 생각합니다. 향후 연구 및 임상 검증에 따라 추천 받는 날이 오기를 전망 합니다.
로봇 재활에 대한 다양한 학회 활동이 활발하게 진행되고 있고, 전 세계적으로 점점 더 많은 대기업 및 스타트업이 이 분야에 대해 투자를 하고 있는 상황입니다. 산학연 모두 큰 관심을 가지고 연구, 투자를 하는 상황이며 의료계에서도 적극적으로 기술을 도입하려는 움직임이 많으므로 로봇 신경재활에 대한 앞으로의 전망은 상당히 밝다고 생각합니다.
Q. 이러한 기술이 왜 중요하다고 보시나요?
로봇을 이용한 신경 재활은 기존의 의사 및 물리/작업 치료사에 의해 수행된 신경 재활을 보완하고, 전체적인 재활 프로그램의 효용성 및 효율성을 증가시키는데 기여할 수 있다고 생각합니다. 특별히, 로봇에 기반한 객관적이고 정밀한 측정 기술은 환자의 상태를 보다 정밀하게 평가/진단할 수 있는 도구로 쓰일 수 있고, 의료진으로 하여금 환자 개개인에 최적화된 재활 치료 프로그램을 선정하고 수행할 수 있게 해줍니다. 또한, 운동 재활치료 중 환자가 보다 능동적이고 적극적으로 참여할 수 있는 로봇 기술을 제공함으로서 재활치료의 효과를 극대화 시키는데 도움을 줄 수 있다고 생각합니다.
Q. 노스웨스턴 대학 시카고 재활연구소(RIC)에서 박사후 연구원으로 2년여 근무하셨는데 무슨 연구를 하셨나요?
포스닥 연구는 셜리 라이언 어빌리티 연구소(SRAL:Shirley Ryan Ability Lab. 기존에 시카고재활연구소였는데 최근에 이름을 변경 하였다)의 센서리 모터 퍼포먼스 프로그램(SMPP) 에서 수행하였습니다.
| |
 |
|
| ▲ A: Shirley Ryan Ability Lab (구 RIC) 전경, B: Shirley Ryan Ability Lab 내부 |
SRAL과 노스웨스턴대학교 의공학과 소속으로 계시는 에릭 페로(Eric Perreault) 교수님 지도 아래 신경근 제어 및 가소성연구소(Neuromuscular Control and Plasticity Lab)에서 반사 기전 (reflex mechanism)이 운동 제어에 있어 어떠한 역할을 하는지에 대한 연구를 건강한 사람 및 뇌졸중 환자를 대상으로 수행하였습니다. 반사기전은 자발적 응답(voluntary response)과 함께 운동 제어에 있어서 중요한 요소로서, 외부 자극에 대한 빠른 반응이라고 간단히 말할 수 있습니다. 반사 기전은 잠복기에 따라 여러 기능적 특성을 가지고 있는데, 특별히 롱 레이턴시 리플렉스(long latency reflex)라 불리는 기전을 중점적으로 연구하였습니다. 이는 빠른 반사 작용과 자발적 응답 특성을 동시에 지니는 고유한 현상으로 다양한 태스크 환경에서 상당히 유연하게 작용하는 특성이 있습니다.
Q. 미국에서 10년 정도 계셨는데 미국 로봇산업의 경쟁력은 어디에 있다고 보십니까?
저의 제한된 경험상, 산업 전반의 경쟁력에 대해서 말하기 보다는 학계에서 미국 로봇 연구의 경쟁력에 대한 저의 간략한 생각을 말씀드리고 싶습니다. 미국 로봇 연구의 경쟁력은 “깊이”와 “다양성”에 있다고 생각합니다. 물론 로봇 연구의 트렌드에 따라 해마다 혹은 단기적으로 이슈가 되는 세부 연구 로봇 분야가 있고, 이에 많은 관심이 집중되는 것은 사실이지만, 많은 연구 그룹 및 연구자들이 트렌드 만을 따르기 보다는 자신들의 고유한 연구 철학 및 장기 비전/계획을 가지고 다양한 세부 로봇 연구에서 지속적인 연구를 수행하고 있습니다. 물론 이는 새로운 연구에 대한 투자뿐 아니라 근간 연구 및 요소 기술에 대한 정부, 기업체, 학교의 투자 및 지원이 있기에 가능하다고 생각합니다. 그 결과 "어떤 학교에 어떤 연구 그룹은 어떠한 분야에 전문성을 가진 곳이다” 라는 연구 그룹들의 아이덴티티가 잘 정립되어 있습니다.
또한, 각각의 고유한 전문성을 가진 여러 연구 그룹이 협업을 통한 시너지를 창출하며 새로운 분야를 개척해내는 연구 방식이 학계에서의 중요한 연구 풍토 중 하나로 자리잡고 있고, 이는 로봇 연구의 혁신 및 다양성에 크게 기여한다고 생각합니다.
Q. 관련 연구를 하면서 가장 어려운 점은 무엇인지요?
많은 연구가 그러하듯 제 연구 또한 언제나 극복해야 할 문제들 어려움의 연속입니다. 앞서 말씀드렸 듯이 제 연구를 수행하는데 운동제어이론과 로보틱스 두 연구 분야가 주로 사용되는데, 두 연구분야의 접근 방식이 상당히 다른 측면들이 있어서 이를 어떻게 잘 결합할 지에 대한 고심을 해야할 때가 많습니다. 다행히 박사 기간 동안 로보틱스를 공부하였고, 포스닥 기간 동안 운동제어에 대해 공부를 했던 경험이 각 분야의 전문가들과 토론을 하는데 큰 도움이 되는 것 같습니다.
또한 신경손상 환자들과 함께하는 연구에 있어서는 건강한 사람들에게서는 예측하지 못했던 변수들이 생기곤 하는데, 함께 연구하는 의료진 및 동료 연구자들의 조언이 큰 도움이 됩니다. 결국 여러 분야의 전문가들과 함께 지속적으로 고심하고 토론하고 해결책을 찾아나가는 것이 어려운 문제 해결에 가장 큰 도움이 되지 않나 싶습니다.
Q. 연구자로서 앞으로의 목표와 꿈이 있다면?
제 연구 목표는 신경질환을 포함한 근골격계 질환 환자들의 운동 기능 회복을 위한 로봇 기반 재활 기술 및 운동 치료 프로그램을 개발하고 이를 실제 임상에 적용함으로서 환자들의 삶의 질의 향상에 기여하는데 있습니다.
단기적으로는 자세 제어 및 보행 능력 향상을 위한 재활 로봇 기술을 연구 개발해 하지에 대한 로봇 재활치료의 효용성 및 효율성을 증가시킬 수 있는 방법론을 제공하는 것을 목표로 하고 있습니다. 궁극적으로 우리가 다양한 운동 시설이 갖추어진 피트니스 센터를 이용하면서 건강을 증진시키는 것과 같이, 근골격계 질환 환자들도 다양한 로봇 기반 재활 시설이 갖추어진 전용 체육관을 이용하면서 좀더 능동적이고 효과적으로 재활 치료를 할 수 있는 새로운 환경을 조성하고 이를 잘 활용하는데 일조하고자 하는 꿈이 있습니다.
Q. 로봇공학자가 되려는 학생들이 늘어나고 있습니다. 그러기 위해서는 어떤 준비와 노력이 필요한지 후배들에게 조언을 해주신다면?
여느 연구가 그러하듯이 훌륭한 로봇 공학자가 되기 위해서 로봇 연구에 대한 열정과 지속적인 관심은 필수라고 생각합니다. 하지만 열정과 관심 못지않게 실제 연구를 수행하기 위한 능력을 꾸준히 길러내는 것이 중요하다고 생각합니다. 학부생이라면 로봇 연구에 필요한 기초체력 예를들면 동역학, 기구학, 신호처리 및 계측, 확률 및 통계, 프로그래밍 등의 공학 필수 과목을 탄탄히 쌓아 놓기를 강력히 추천합니다. 튼튼한 기초 지식을 바탕으로 빠르게 발전해 가는 학문의 트렌드를 잘 따라가고 습득할 수 있다면 로봇 연구 측면에서 큰 도움이 될 것 입니다.
또한, 요즈음은 로봇 연구를 하기 위한 너무 좋은 하드웨어, 소프트웨어 도구들이 많아서 이러한 도구들을 잘 사용하는 능력을 가지는 것도 너무나 중요하다고 생각합니다. 이상적으로는 튼튼한 기초 체력을 바탕으로 이론과 응용 능력 모두를 겸비하는 로봇 공학자가 되는 것이지만, 다학제적이고 근래 빠르게 발전하는 로봇공학의 특성상, 현실적으로 두 마리 토끼를 모두 다 잡는 것이 쉬운 일은 아니라고 생각합니다. 로봇 분야에서 자신이 최종적으로 목표하는 바가 무엇인지를 신중히 생각해 보시고 어디에 좀 더 비중을 두고 공부하고 연구할 지를 잘 생각하시기를 바랍니다.
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 계시다면...
많은 연구자들이 그렇듯이 저 또한 이론, 연구 접근 방식 등 다양한 측면에서 제 지도 교수님이셨던 MIT 네빌 호간(Neville Hogan) 교수님과 노스웨스턴대학교 에릭 페로(Eric Perreault) 교수님의 영향을 가장 많이 받은 것 같습니다.
| |
 |
|
| ▲ 박사 지도 교수님 이신 Neville Hogan 교수님과 함께 |
이 외에도 영국 임페리얼 칼리지 런던의 에티엔 버뎃(Etienne Burdet) 교수님, 캐나다 맥길대학 로버트 키어니(Robert Kearney) 교수님 및 캐나다 퀸즈대학 스테픈 스캇(Stephen Scott) 교수님도 제 연구에 큰 영향을 주신 분들입니다. |