|
한국로봇학회(회장 최혁렬 성균관대 교수)는 제15회 유비쿼터스로봇 국제학술대회(UR 2018. 조직위원장 박종우 서울대 교수)를 지난달 26일부터 30일까지 5일간 미국 하와이 호놀룰루 컨벤션센터에서 성공적으로 개최했다고 밝혔다.
| |
 |
|
| ▲미국 스텐포드대 오카무라 앨리슨 교수의 초청강연 모습 |
| |
 |
|
| ▲일본 동경대 스기야마 마사시 교수 초청강연 모습 |
| |
 |
|
| ▲서울대 박재흥 교수 초청강연 모습 |
이번 학술대회에서는 초청강연자로 미국 스텐포드대 오카무라 앨리슨 교수(Allison Okamura)가 "Let’s be Flexible: Soft Haptics and Soft Robotics", 일본 동경대 스기야마 마사시 교수(Masashi Sugiyama)가 "Machine Learning from Limited Supervision", 서울대 박재흥 교수가 "Compliant Motion Control of Humanoid Robots for Real-World Applications"를 주제로 각각 초청강연자로 나섰다.
| |
 |
|
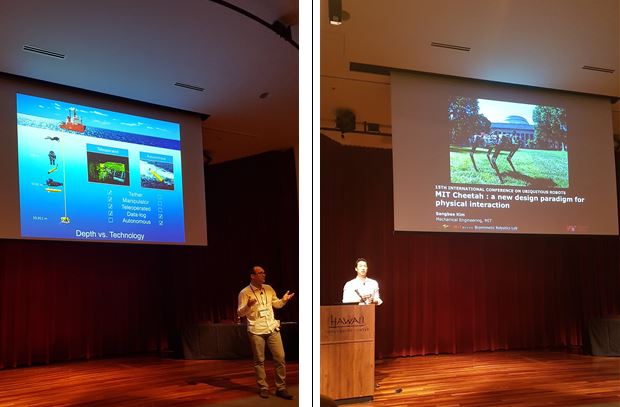
| ▲스페인 기로나대학 라파엘 가르시아 박사(좌측)와 MIT 김상배 교수(우측) |
| |
 |
|
| ▲KAIST 김아영 교수가 기조강연을 펼치고 있다. |
| |
 |
|
| ▲미국 애리조나주립대 이형래 교수가 기조강연을 하고 있다. |
기조 강연자로는 스페인 기로나대학 라파엘 가르시아(Rafael Garcia) 박사가 "Towards immersive benthic exploration using intelligent robots", MIT 김상배 교수가 "Robots for Physical Work", KAIST 김아영 교수가 "Versatile robotic perception and navigation in urban environment", 미국 애리조나주립대 이형래 교수가 "Understanding Human Mechanical Impedance for the Advancement of Robot-Aided Rehabilitation"를 주제로 각각 기조강연을 펼쳤다.
이외에도 △2018 Workshop on Korea-US Disaster Relief Robots △Workshop on Real-Time and Embedded AI for Autonomous Vehicles (WREAV) △Workshop on climbing robot technology for facade/glass cleaning application △Workshop on Industrial Robots and Manufacturing Automation △Workshop on Soft Robotics을 주제로 한 다양한 워크숍 행사가 열렸다.
| |
 |
|
| ▲스포트라이트 토크 형태로 진행된 구두논문 발표 모습 |
구두 논문 발표는 스포트라이트 토크 형태로 진행하였다. 즉 발표자별 5분 분량의 비디오에 맞춰 구두 발표하고, 세션당 4편의 논문을 연달아 발표한 뒤 4편 논문에 한하여 10분 Q&A를 가지는 방식이었다. 스포트라이트 토크 세션 종료 후에는 포스터 발표장에서 추가적으로 이야기를 나눌 수 있도록 구성하여 참가자들의 반응이 좋았다.
| |
 |
|
| ▲포스터 세션 모습 |
| |
 |
|
| ▲부산대 이민철 교수, KIST유범재 단장, 기계연구원 경진홍 박사가 포스터 논문에 대해 이야기를 나누고 있다. |
한편 이번 학술대회의 하이라이트인 최우수논문상(Best Paper Award)은 미국 써던메소디스트대학팀(Louis W. Rogowski, Hoyeon Kim, Xiao Zhang, Min Jun Kim)의 "Microsnowman Propagation and Robotics inside Synthetic Mucus"논문이 차지했다.
최우수 응용논문상(Best Application Paper Award)은 한국 네이버랩스(최동일.김민수.김형근), KAIST(최종훈), 서울대(Moses C. Nah) 연합팀이 "Motion Planning of Autonomous Personal Transporter using Model Predictive Control for Minimizing Non-minimum Phase Behavior"를 주제로 차지했다.
주목할만한 논문상(Outstanding Paper Awards)에는 미국 애리조나주립대팀(Varun Nalam and Hyunglae Lee)과 포항공대팀(Minjae Kim, Gangyong Gu, Woongyong Lee, and Wan Kyun Chung)이 "Environment-Dependent Modulation of Human Ankle Stiffness and its Implication for the Design of Lower Extremity Robots"와 "Pneumatic Sleeve-Assisted Stable sEMG Measurement for Microneedle Array Electrode"에 대한 연구로 각각 수상했다.
| |
 |
|
| ▲Banquet 모습 |
|






















