|
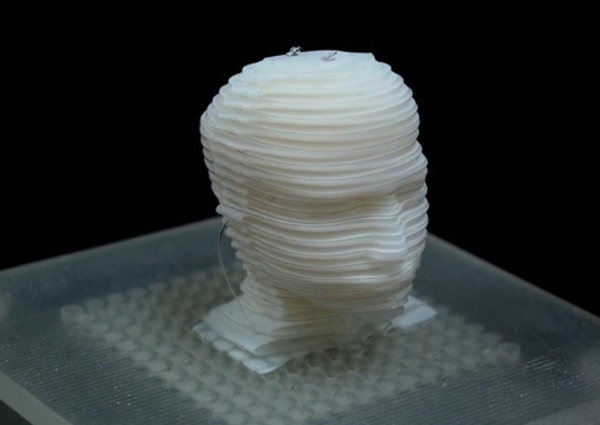
한국과학기술연구원(KIST) 지능로봇연구단 임세혁 박사팀이 전산 알고리즘을 이용해 설계된 종이전개도를 프린터로 출력하고 이를 접어 3차원 형상의 소프트 로봇을 제작하는 기술을 개발했다고 20일 밝혔다.
3D 프린터를 사용하는 분야에서 로봇을 구동장치까지 한 번에 제작하는 기술은 현재 선진국에서도 활발히 연구되고 있으나, 기본적으로 고가의 장비를 필요로 할 뿐 아니라 로봇의 동작범위나 속도 등이 제한적이었다.
연구진은 원하는 로봇의 3차원 형상과 구현하고자 하는 동작을 사전에 설계한 뒤 자가조립에 의해 기존의 방식보다 더 저렴하고 용이하게 로봇을 구현할 수 있는 기술을 개발했다. 연구진은 이 방식을 `적층형 자가접이`라고 이름 붙였다. 이렇게 만들어진 로봇은 부드러운 몸체와 외부 충격에 유연한 특성을 갖게 된다.
| |
 |
|
| ▲ KIST 임세혁 박사 |
임세혁 박사는 "탄성이 있는 평면 소재는 무엇이든 사용할 수 있고 원하는 소프트 로봇의 디자인과 기능에 따라 최적의 설계를 할 수 있다"며 "이 소프트 로봇 기술에 최근 급격히 발전하는 대화형 인공지능 기술을 융합하면 개인·서비스 로봇 관련 산업에도 광범위한 변화를 일으킬 수 있을 것"이라고 말했다.
이번 연구는 과학기술정보통신부 지원으로 KIST 기관고유사업으로 수행됐으며, 로봇 분야 국제학술지인 ‘국제로봇연구저널(The International Journal of Robotics Research)’ 최신호에 게재됐다.
|