|
15일에서 18일까지 대구 엑스코에서 열린 ‘제6회 대구 국제로봇산업전(ROBEX 2017)’ 행사장의 모습을 사진으로 담았다.
이번 전시회에는 대구로 근거지를 옮긴 현대로보틱스가 처음 전시회에 참가했으며, 이외에도 한국야스카와, 한국스토브리, 알에프, 월성티엠피, 대구경북과학기술원(DGIST), 대구기계부품연구원, 대경로봇기업진흥협회 등 대구경북 유관기관 및 연구원, 해외 로봇 클러스터 등이 참여했다.
| |
 |
|
| ▲ DGIST의 Mobile Worker |
| |
 |
|
| ▲ DGIST의 소형 자기장 코일 |
| |
 |
|
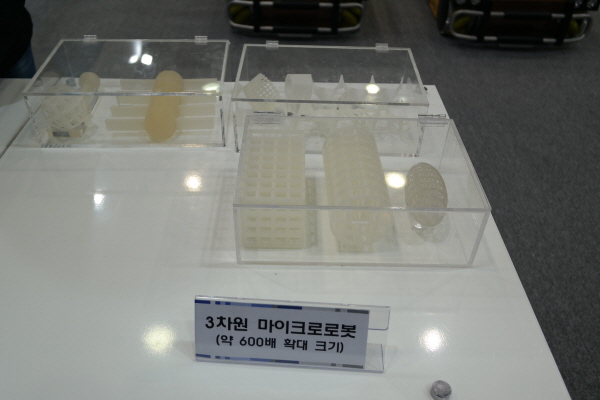
| ▲ DGIST의 3차원 마이크로 로봇 |
| |
 |
|
| ▲ DGIST의 압전 MEMS |
| |
 |
|
| ▲ AIM의 델타로봇 |
| |
 |
|
| ▲ 현대로보틱스의 산업용로봇 |
| |
 |
|
| ▲ 현대로보틱스의 산업용로봇 |
| |
 |
|
| ▲ 야스카와의 산업용로봇 |
| |
 |
|
| ▲ 야스카와 부스 |
| |
 |
|
| ▲ 야스카와의 산업용로봇 |
| |
 |
|
| ▲ 스토브리의 산업용로봇 |
| |
 |
|
| ▲ 스토브리의 수중작업용로봇 |
| |
 |
|
| ▲ 스토브리의 로봇툴 체인저 |
| |
 |
|
| ▲ 대구기계부품연구원의 안전방재조정시뮬레이터 |
| |
 |
|
| ▲ 로봇블럭시스템의 드론 |
| |
 |
|
| ▲ 삼익 HDS의 하모닉드라이브 |
| |
 |
|
| ▲ 알에프의 유리창 청소로봇 윈도우메이트 |
| |
 |
|
| ▲ 쎄텍의 TORQUE TRANSDUSER |
| |
 |
|
| ▲ 월성티엠피의 원격조종로봇 |
| |
 |
|
| ▲ 이노스웰의 원전 파워 플랜트용 로봇 |
| |
 |
|
| ▲ ROBBO의 교육용 프로그램 및 로봇키트 |
| |
 |
|
| ▲ 센서텍의 다양한 센서들 |
| |
 |
|
| ▲ 대경로봇기업진흥협회공동관 모습 |
| |
 |
|
| ▲ mass로보틱스 부스 |
| |
 |
|
| ▲ 실리콘벨리 로보틱스부스 |
| |
 |
|
| ▲ COBOTEAM의 산업용로봇 |
| |
 |
|
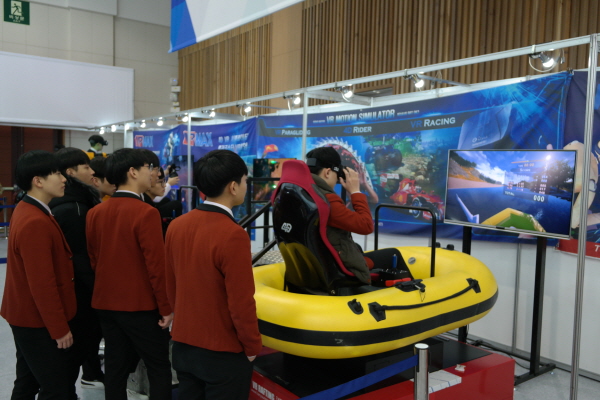
| ▲ VR체험전 모습 |
| |
 |
|
| ▲ 유니콘스의 승마게임로봇 |
| |
 |
|
| ▲ 수출상담장 모습 |
| |
 |
|
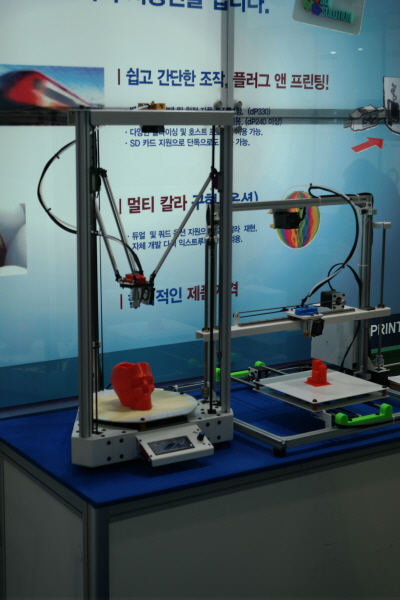
| ▲ 두원오토메틱스의 3D프린터 |
| |
 |
|
| ▲ 삼쩜일사의 다양한 로봇 |
| |
 |
|
| ▲ 삼쩜일사 부스 모습 |
| |
 |
|
| ▲ 로보프린터의 벽화 로봇 |
| |
 |
|
| ▲ 행사장 현장모습 |
| |
 |
|
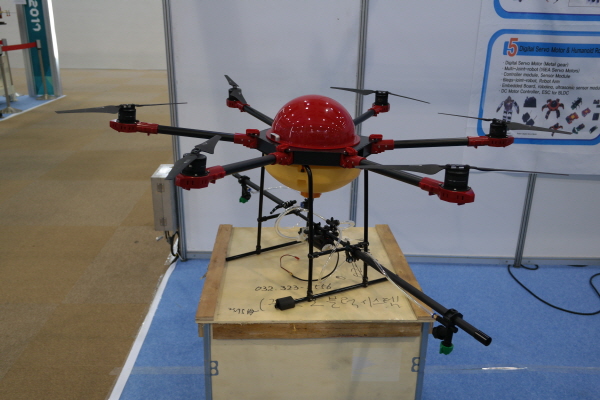
| ▲ 호그그린에어의 드론 |
| |
 |
|
| ▲ 행사장모습 |
|
















