‘IEEE 스펙트럼’은 최근 서울대 기계항공공학부 이동준 교수의 ‘인터랙티브/네트워크 로보틱스 연구실(INRoL)’에서 진행하고 있는 로봇 매니퓰레이션에 관한 연구를 소개했다. 서울대 INRol은 그동안 드론의 공중 매니퓰레이션, 자율비행, 햅틱과 VR, 로봇의 원격 조작(텔레로보틱스) 등에 관한 연구를 주로 해왔다.
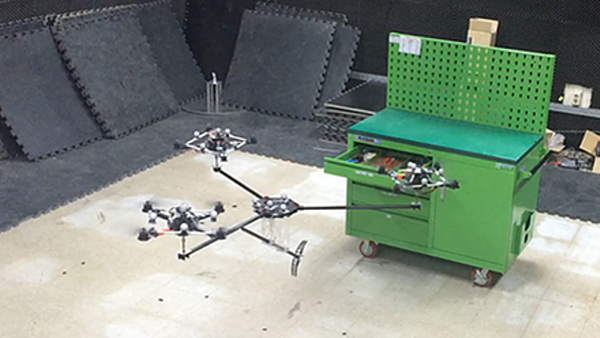
▲드론 플랫폼이 이동하면서 책상 서랍을 닫는 동작을 시연하고 있다.
이번에 'IEEE 스펙트럼'이 소개한 로봇 기술은 쿼드콥터 등 멀티로터(multi-roter) 드론을 활용한 공중 매니퓰레이션 기술인 ‘SmQ(Spherically-connected multiple Quadrotor)’ 플랫폼과 ODAR (Omni-Directional Aerial Robot) 플랫폼이다. 일반적으로 쿼드콥터 등 멀티로터 드론들은 공중에서 고도를 유지하면서 물건을 잡거나 밀어내는 등 동작을 하는 게 매우 어렵다. 특히 하늘에 바람이 거세게 불 경우에는 더욱 힘들다. 이 교수팀은 멀티 드론을 이용해 작은 구멍에 막대기를 집어넣거나 캔버스에 원을 그리는 등 고난이 기술을 선보였다.
이동준 교수 연구실에서 개발 중인 ‘SmQ’ 플랫폼은 드론을 서로 연결하는 프레임을 만들어 비행하면서 지상에 있는 책상의 서랍을 닫거나 콜라를 다른 곳으로 옮기는 작업을 수행할 수 있다. 원형 모양의 조인트(spherically joint)에 멀티 드론을 연결하고 6자유도의 로봇 팔을 탑재해 고도를 유지한채 고난도 매니퓰레이션을 할수 있다. 동영상을 보면 전체 프레임에 3대의 쿼드콥터가 연결되어 있으며, 사람이 특정 드론에 압력을 주더라도 전체적으로 균형을 잃지 않는다. 이들 드론은 사각형(2m X 2m) 모양의 공간을 트래킹할 수 있으며 롤(roll), 피치(pitch), 요(yaw) 동작이 가능하다.
이 교수팀이 개발 중인 ODAR 시스템은 6자유도의 렌치(wrench)를 만들어 멀티 로터를 붙였다. 이 드론 플랫폼은 수직 또는 수평적으로 위치를 유지하면서 1m 직경의 원을 트랙킹할 수 있다.
6kg 이상의 물체를 밑으로 밀치거나 고정밀 작업이 요구되는 구멍에 못 박기 등 동작을 원격 제어할 수 있다. 동영상을 보면 드론 플랫폼이 지상 또는 세워져 있는 캔버스 모양의 화폭에 원을 그리는 모습, 작은 직경의 구멍에 막대기를 집어 넣는 동작을 원격 제어하는 모습을 볼 수 있다.