|
일본 도시바기계는 지난 18일부터 20일까지 일본 도시바 누마즈 공장과 고덴바 공장에서 ‘도시바기계 솔루션 페어 2017‘을 개최했다. 도시바기계 그룹은 산업용 기계를 주로 생산 하고 있는 기계제조 중심 회사로서 나노가공기, 사출기, 다이케스팅, 초대형 공작 기계를 비롯한 디양한 제어장치, CNC 콘트롤러, 서버 드라이브/모터, PLC 등을 생산하고 있다. 최근 자동화의 핵심 요소인 로봇사업도 30년 정도의 역사를 갖고 있다. 이번 솔루션 페어를 참관하고 돌아온 엑트엔지니어링(주) 최영수 대표가 도시바 기계 솔루션 페어 참관기를 보내왔다. 주요 내용을 소개한다.
| |
 |
|
| ▲ 엑트엔지니어링 최영수 대표 |
▲IoT(Internet of Things )
이번 솔루션 페어에서 특히 눈에 띄는것은 IoT 기술이었다. 최근들어 크게 이슈가 되고 있는 인더스트리 4.0, 스마트 팩토리의 혈관 열할을 하는 것이 IoT 기술이고, 그것을 진단하는 기술이 기계의 상태를 모니터링하고 데이터를 제공하는 센서(Sensor) 기술이다.
도시바 기계 그룹은 IoT+M을 전시했는데, 이것은 ‘Internet of Things+ Manufacturing’의 의미로서 IoT의 기술을 제조 현장에 적용하는 선진 기술을 보여주었다.
다양한 경로로 다양한 데이터를 수집하는 기술은 대체로 많은 곳에서 개발, 생산되고 있으나 이 데이터를 적정하게 분석하느냐 하는 것은 큰 숙제로 남아 있다. 이것은 단순히 진동의 크기로 장비의 상태를 진단할수 없기 때문이다. 이 데이터의 분석에는 오랜 기간 축적된 다양한 형태의 데이터와 분석을 위한 기술들이 적절하게 접목되어야 최적의 상태를 진단하고 장비의 상태를 예측할 수있다. 여기에 최근 들어 각광을 받고 있는 AI기술을 접목해서 데이터를 해석하는 기술도 선보였다. 이것은 방대한 데이터를 기반으로한 축적된 해석기술을 바탕으로 분석이 가능한 기술이다.
도시바기계는 말단의 정보를 수집하기 위한 센서류들을 전시했고 이들의 데이터 통신을 원활하게 할 수 있는 통신 시스템과 오픈 프로토콜(Open Protocol)도 소개했다. 또한 데이터를 가공하지 않은 상태로 많은 양을 보내게 되면 데이타의 트레픽에 문제가 발생하기 때문에 데이터를 압축하는 기술, 어떤 비정상 상태에서 데이터를 보내지못하면 이를 백업해 통신 재개시 즉시 데이터를 보내는 기술, 이렇게 수집된 데이타를 분석하는 솔루션 등 다양한 제품이 소개됐다. 도시바 솔루션 페어는 누마즈 공장과 고덴바 공장에서 전시를 하는데 누마즈의 로봇, 제어 관련 전시관에서 고덴바 공장 등 다른 장소의 다양한 장비의 상태를 모니터링하고 분석하는 것을 볼수 있었다. 앞으로도 지속적인 발전을 해야하는 분야는 역시 데이터를 어떻게 해석해서 예측 할수 있느냐 일 것이다.
▲로봇 신제품
1)TVM 시리즈
지금까지 도시바기계의 6축 다관절 로봇은 팔길이(Arm Length)가 500mm ~1000mm으로 TV와 TVL 시리즈였었으나 이번에 팔 길이를 1500mmRkwl 제품군을 추가해 보다 폭넓은 분야에 적용이 가능해졌다. 그리고 가반 중량(Payload)는 3Kg~10Kg까지였으나 20Kg까지 확대되어 보다 중량감 있는 제품의 핸들링이 가능해졌다. 그리고 사진에서 볼수 있듯이 다소 독특한 디자인으로 제품을 만들었다. 이들 제품은 많은 편리성을 제공하고 있다. 측면에 다양한 제품의 부착이 가능하고 또한 배관 또는 선처리를 쉽고 간단하게 할수 있으므로 현장 활용도를 극대화할수 있다.
2)THE 400 시리즈
스카라 로봇은 아마도 산업용 로봇에서 가성비가 뛰어나고 응용분야가 넓게 사용되고 있는 로봇으로 도시바기계는 THL시리즈(10Kg급)와 TH 시리즈(20Kg급)를 생산하고 있다. 이번에 발표된 THE 시리즈는 가반 중량(Payload)보다는 속도와 정밀도에 중점을 둔 시리즈로서 5mm의 진원을 그리는 속도와 절밀도가 탁월하다. 궤적 정밀도의 향상은 디스펜싱, 용접등에도 적용이 가능한 로봇이라는 것이고 빠른 속도는 픽 앤 플레이스(Pick & Place) 작업시 사이클 타임(Cycle Time)을 단축할수 있다. THE400의 사이클 타임은 0.3초대이다.
3)AR(SCARA Robot)
인더스트리 4.0, 스마트 팩토리, IoT의 발달은 모든 생산 현장에 데이터를 수집하고 관리 분석하는데 중점이 된 것인데 도시바 기계는 AR(증강현실) 기술을 예방 보전과 수리에 적용 가능하다는 것을 실증적으로 보여주었다.
AR기술은 현실세계의 기반 위에 가상의 사물을 합성하여 현실 세계만으로 얻기 어려운 부가적인 정보를 보강해 제공할 수 있는 기술이다. 이 기술을 이용하면 장비의 정기적인 점검, 문제 발생시 보수, 장비의 현재 상태 등을 정확히 분석하고 데이터화 할 수 있다. 예방 보전의 경우는 일정기간마다 점검해야 하는 점검 리스트를 바탕으로 증강현실의 가상의 이미지로 점검 위치를 보여주고 문제가 발생하면 가상의 사물에 조치 방법을 동영상으로 보여줌으로서 누구나 조치 가능하도록 할수 있다. 이런 기술은 상용화에는 아직 시간이 걸리겠지만 도시바 기계에서 미래의 가능성을 보여주었다는데 의미가 있다.
4) 로봇 애플리케이션
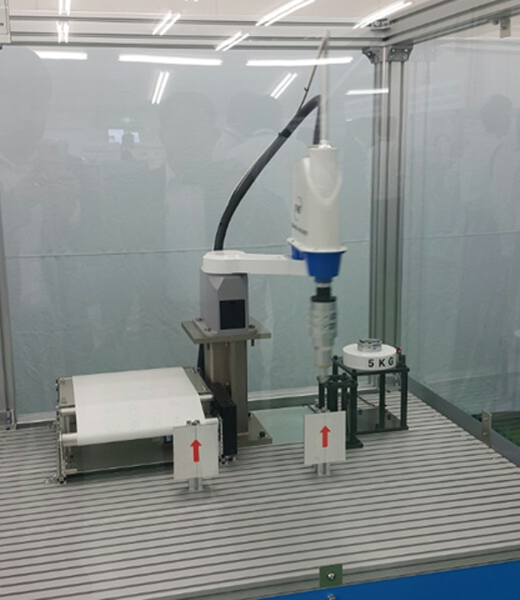
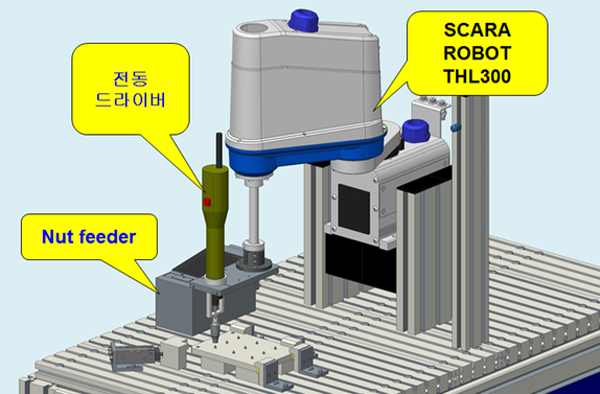
1.넛 러너(Nut Runner)=일반적인 경우는 볼트를 체결하는 경우가 많으나 이번 전시된 것은 넛트를 체결하는 것이다. 5mm 이상의 넛트의 체결은 사람이 하더라도 부담이 가지 않는 일이기는 하지만 넛트의 사이즈가 작아지면 이야기가 다르다. 2mm 정도의 넛트는 사람이 조림해도 어려울뿐 아니라 잠시만 작업을 하더라도 손의 피로도가 높아서 생산성이나 작업성을 기대하기 어렵다. 이번 솔루션 페어에서 선보인 제품은 2mm의 넛트를 핸드폰 정도의 장비에 체결하는것이다. 우선 가장 어려운 부분이 넛트를 전동 공구에 집게 하는것이다. 넛트의 경우는 대략 6각형으로 되어 있으므로 부품 자동정열공급기(Parts Feeder)에서 공급을 하더라도 원활하게 공구에 장착하는 것이 상당히 까다로운 작업이다. 그후에 볼트의 위치에 정확하게 위치를 잡을 것이다. 그후에는 거의 순식간에 체결할 수 있다.
2.모바일 시트(Mobile sheet)=핸드폰의 제조 공정의 거의 마지막에 유리면을 보호하기 위해서 필름을 부착해야 한다. 이 작업은 사람의 경우도 숙련도가 요구되고 집중을 해야하는 작업이므로 상당히 까다로운 작업중에 하나다. 이것은 기존의 장비는 직교 로봇을 사용하는 경우가 많았으므로 모델의 변경에 따른 유연한 대응이 어려웠었으나 6축 다관절 로봇을 사용함으로서 보통의 숙련된 작업자 이상으로 빠르게 작업을 하고 안전되게 24시간을 작업할 수 있다. 또한 모델의 변경에 대해서도 간단한 티칭많으로도 광범위한 영역에 대해서 대응이 가능해진다.
3.나노 가공기 로딩, 언로딩( Loading, Unloading)=도시바의 강점중 하나는 다양한 기계를 생산하고 이를 로봇을 이용한 자동화를 한다는 것이다. 나노가공기의 종류에도 여러가지가 있으나 이번에는 UVM450 2대를 6축 다관절 로봇 TV1000을 천정형으로 설치해서 부품의 공급, 배출하는 것을 전시했다. 이것은 2대의 거리가 로봇의 팔길이 1000mm보다는 훨씬 멀기 때문에 상부에 직교 로봇을 설치하고 각각의 장비 앞에서 제품을 핸들링한 것이다. 팔길이를 긴 로봇을 사용하는것도 가능하겠지만 팔길이가 길어지면 로봇은 반복 정밀도가 현저하게 떨어짐으로 제품을 정확한 자리에 공급하기가 어려울 수도 있다. 최근의 추세는 직교 로봇을 사용해서 원하는 위치로 이동시키고 가능한 한 근접한 위치에서 제품을 핸들링함으로서 반복 정밀도를 향상 시키고 안정된 시스템을 구축할 수 있게 된다.
4.3D 비전 애플리케이션=도시바 기계 그룹은 로봇과 비전 솔루션을 동시에 제공하고 있다. 6축 다관절은 TV, TVL, TVM시리즈가 있고 3Kg ~ 20 Kg까지의 제품군을 보유하고 있고 3D 비전은 Ts비전3D라는 제품군을 공급하고 있다. 3D비전과 로봇은 일반적으로 3D 데이터를 입력해서 이 데이터와 제품을 비교하는 형식이지만 도시바는 제품을 촬영하는 것만으로도 제품의 크기 형상을 인식할 수 있는 기술을 보유 하고 있고 대체적으로 제품이 박스에 담겨져 있는 경우가 많기 때문에 박스의 크기, 깊이를 자동으로 인식하고 박스 충돌 회피 기능이 있어서 충돌 위험성을 미리 방지할 수 있다. 이러한 특징으로 규정된 데이터로 표현, 작성이 가능한 제품은 물론이지만 형상의 표현이 어려운 농산물의 작업에도 사용할 수 있다.
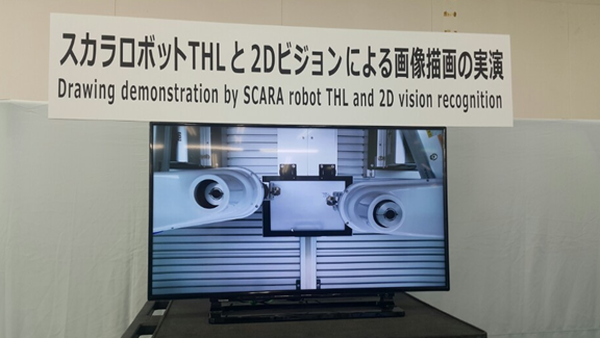
5. 스카라 로봇 2대로 그림 그리기=카메라로 사람을 찍으면 그 카메라는 이미지를 전송해서 윤곽선을 추출하고 스카라 로봇 2대가 그림을 그리는 시연이었다. 이것은 사진을 찍고 출력까지 대략 5분 정도의 시간이 소요되는데 재미 있는 경험이었다. 가끔 6축 로봇이 그림을 그리는 기사를 본 적이 있었는데 이것에 비해서 간단한 시스템으로 구축이 되었고 비교적 빠른 시간안에 그림 그리기를 완성하는 모습이었다. 이것은 그리는 자체에 초점을 둔 것이 아니라 이벤트성 시연이었다.
6.충돌방지 애플리케이션=2대의 로봇이 같은 공간을 포함한 작업을 해야 하는 경우가 있다. 이 경우 먼저 고려를 해야 하는 것이 충돌을 예방하는 것 이다. 이번에 선보인 데모는 두대의 로봇이 공동으로 작업해야 하는 영역을 설정하고 다른 로봇이 설정 범위 내에 있는 경우, 설정 영역에 들어가면 즉시 정지. 설정 영역 외에서는 무조건 동작 가능하도록 하는 것이었다. 로봇(B) 설정 영역에 있는 로봇(A)는 설정 영역에 들어가면 즉시 중지하고 로봇(B)가 설정 영역에서 나온 시점에서 동작을 재개한다. 이 기능은 프로그램에 의한 제어가 아닌 컨트롤러 내장 PLC만으로 감시 제어를 한다.
▲Ts어시스트
Ts어시스트(Assist)는 도시바 로봇 프로그램 도구로 TSPC와 같이 사용할수 있으나 일부 로봇 기종은 반드시 Ts어시스트를 사용해야 한다. 이번 솔루션 페어에선 2가지 기능이 주로 주목을 받았다.
1. 비전 좌표계 캘리브레이션(calibration) 기능=비전 시스템을 로봇에 연결을 하는 경우에 비전으로부터 보내지는 데이터는 로봇이 즉시 활용할 수 있도록 비전 좌표계가 아니라 로봇좌표계로 치환해서 보내져야 한다. 비젼 시스템에 이 기능이 있다면 비전에서 설정 또는 연산을 해서 보내주면 되지만 경우에 따라서는 이 기능을 갖추지 않은 비전도 있으므로 이에 대한 대안으로 도시바에서는 Ts어시스트가 이를 자동으로 치환해주는 기능을 제공하고 있다. 이것은 보다 다양한 비젼을 연결 할수도 있고 간편하게 설정을 할수 있도록 특별한 UI를 제공하기 때문에 로봇 제어기에 대한 파라메타 설정등이 필요 하지 않고 자동적으로 Ts어시스트가가 좌표를 읽고 등록, 변환하는 기능을 말한다.
2.3D Data로부터 자동으로 포인트(Point) 취득 기능=최근들어 대부분의 설계가 3D로 이루어 지고 있고 3D 데이터를 이용해서 시뮬레이션 등을 하고 있다. 여기서 복잡한 형상을 티칭(Teaching)해야 하는 경우 간편하게 3D데이터를 이용해서 원하는 부분을 자동적으로 로봇 프로그래밍해서 생성하는 기능을 소개 한다. 이것은 디스펜싱(Dispensing) 같은 포인트가 많은 경우에 유용 할수 있고 간변하게 로봇 프로그램을 완성할 수 있다. 원하는 영역을 마우스로 설정하고 피치(Pitch)를 설정해서 실행하면 원하는 포인트의 정보를 로봇 프로그램의 포인트 데이터(Point Data)로 생성하는 기능이다.
|