|
로봇신문은 한국로봇산업진흥원의 로봇산업클러스터 조성사업에 일환으로 구축된 로봇산업클러스터장비를 소개하는 코너를 마련했다. 첫 번째로 S/W 장비를 소개한다.
① 디자인 / 설계
1) 표면 설계 도구 (Surface Design tool)
- 로봇제품 3D 표면디자인 설계 제작 및 시제품 제작 활용
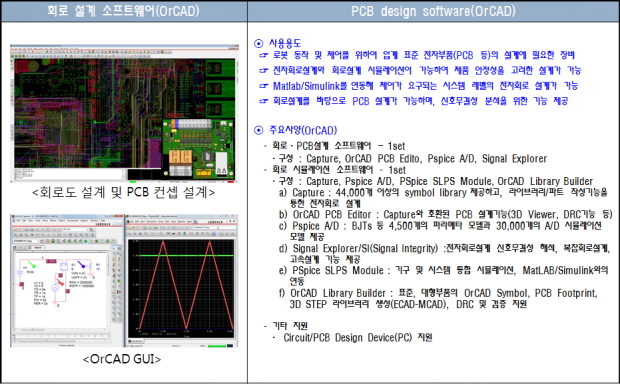
2) 회로 설계 소프트웨어 (PCB design software)
- 로봇 구동에 필요한 전자회로 및 PCB 회로 설계
3) 테크니컬 컴퓨팅 언어 (Technical computing language)
- 전자시스템 개발, 수치해석 및 변수 최적화를 위한 환경 제공
4) 통합 GUI개발 도구 (Integrated GUI development tool)
- 제어알고리즘 구현 및 상용 소프트웨어 개발 가능 S/W
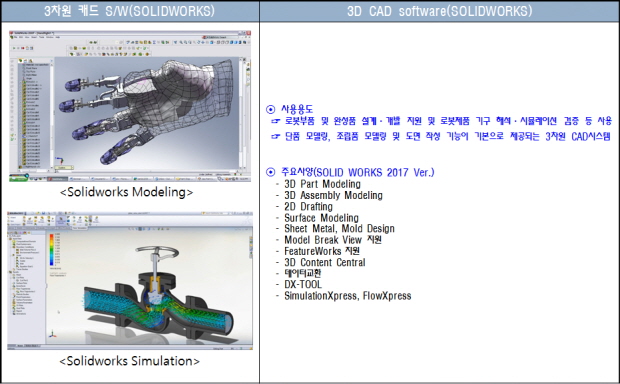
5) 3차원 캐드 소프트웨어 (3D CAD software)
- 견고한 스케치 기능으로 더 쉽고 빠르게 개념화하여 설계가 가능
- 초보자에게 로봇의 기구학적 요소를 고려한 설계 기술 등을 습득해 로봇의 단품
설계를 통해 최종 제품을 가상 환경에서 구현
6) 3차원 역설계 소프트웨어 (3D reverse engineering software)
- High-end 제품의 기계적 형상설계 및 설계변경에 유연하게 활용
- 다중 곡면이 포함된 초정밀 제품 설계가 가능하며 데이터 관리를 통한 효율적인
기술 개발 프로세스 지원
7) 3차원 형상 스캐너 (3D Scanner)
- 자동화 로봇의 부품 개발에 있어 디자인 및 설계검증부터 부품 검사 및 역설계를
위한 설계 분석 환경 제공
8) 재구성 가능한 모듈형 서비스로봇 시스템 (Reconfigurable Modular Service Robot System)
- 모바일 로봇플랫폼, 로봇핸드, 머니퓰레이터의 통합 제어시스템을 이용하여 실제
조작성능 시뮬레이션을 통한 각종 제어 모델 구현
9) 데이터 표면 현실화 제작 S/W (Surface reality production data s/w)
- 로봇제품의 시제품 제작 전 재질 및 컬러 적용을 통한 시제품 제작 실패율 감소
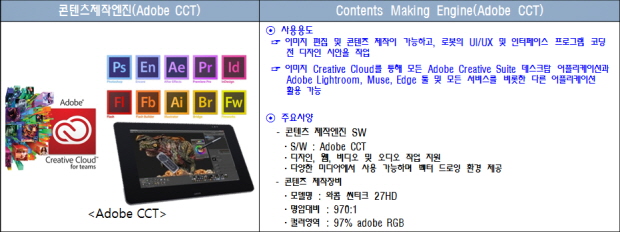
10) 콘텐츠 제작엔진 (Contents making engine)
- 로봇제품의 2D디자인(브로슈어, 패키지 등)및 UI/UX 콘텐츠 제작 활용
② 해석 / 시뮬레이션 장비
1) 다분야 유한요소 사전처리도구
(Multi-disciplinary Finite Elements pre-processing tools)
- CAE 모델링의 작업, 대규모 어셈블리에 대한 유한요소 매쉬 자동 생성 지원
2) 동 역학 및 해석 S/W (Dynamics and analysis software)
- 다물체 동역학 등의 해석 환경을 제공하여 제품 품질 향상 및 신뢰성 확보 가능 3) 로봇 시뮬레이션 S/W (Robotics simulation software)
- 가상 시뮬레이션 환경을 제공하여 기구학적 동적 거동을 분석하고 제어 전략을 수립
4) 가상화 엔지니어링 시스템 (Virtualization engineering System)
- 로봇 산업에서의 제품 개발 과정의 디자인, 해석, 검증 및 평가의 전 프로세스를
통합하여 엔지니어들의 데이터 호환 및 협업시스템 활용
- 로봇의 개발 초기부터 완성 후까지의 다양한 가상 현실 시스템 환경 체제 구축 지원
- 다양한 시운전 환경을 가상으로 구축 가능하여 시험환경 구축비용을 줄이는 용도로
활용
|