| 기사 (전체 17,199건) |
  |
|
|
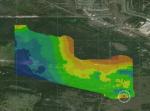 |
[미래기술] 영국 국립 원자력로봇센터, 드론 매핑 시스템 개발
영국 '국립핵로봇센터(NCNR)' 과학자들이 안전한 거리에서 위험한 곳을 조사할 수 있는 드론 매핑 시스템을 개발했다고 BBC가 보도했다. 이 시스템은 지구상에서 가장 방사능이 많은 곳 중 하나인 체르노빌의 ‘레드 포레스트(Red For
2019-05-20
|
|
|
|
 |
[동정] 서울대 훌륭한 공대 교수상, 신종계·이경무·신영길 교수 수상
서울대는 ‘2019 훌륭한 공대 교수상’ 수상자로 조선해양공학과 신종계 교수(교육상), 전기공학부 이경무 교수(학술상), 컴퓨터공학부 신영길 교수(산학협력상)를 선정했다고 20일 밝혔다.‘훌륭한 공대 교수상’은 서울대 공대 교수들의 연구 활동을 진작하
2019-05-20
|
|
|
|
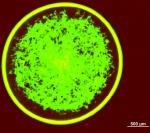 |
[전문서비스 로봇] 일본 홋카이도대, '인공근육' 분자 로봇 개발
일본 홋카이도대학 연구진이 약물전달시스템(DDS)으로 활용할 수 있는 분자 로봇을 개발했다.일본경제신문에 따르면 홋카이도대학 물질화학연구실 ‘가쿠고 아키라(角五彰)’ 교수팀은 간사이대학(関西大学)·도쿄공업대학 연구진과 공동으로
2019-05-20
|
|
|
|
 |
[인물연구] '젊은 로봇 공학자' (23) 임수철 동국대 교수
'젊은 로봇공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.23번째 인터뷰는 동국대 임수철 교수다. 임
2019-05-20
|
|
|
|
 |
[전문서비스 로봇] 中 알리바바 그룹, 스마트 식당 서비스 등 선봬
중국 알리바바그룹의 식당 및 요리 로봇 기술이 스마트해지면서 중국인들의 일상에 파고들고 있다.‘신징바오(新京报)’에 따르면 최근 베이징 '아시아문명대화대회'의 일환으로 진행된 '아시아 미식데이'에서 알리바바그룹
2019-05-20
|
|
|
|
| [인사] 산업통상자원부
△ 산업통상자원부 인사발령 (2019년 5월 19일자) - 과장급 전보 ▲ 무역위원회 덤핑조사과장 양원창
2019-05-20
|
|
|
|
 |
[종합] 한국로봇산업진흥원, 로봇활용 지도교사 양성 연수 개최
한국로봇산업진흥원(원장 문전일)은 올해 처음으로 로봇활용교육 지도 가능한 교사가 없는 초등학교 교사에 지도교사 양성 연수를 실시했다.한국로봇산업진흥원은 지난 18일, 대전역 회의실에서 11개 초등학교, 13명의 교사를 대상으로 ‘2019년도 로봇창의교
2019-05-20
|
|
|
|
 |
[인공지능] '에어 캐나다', 인공지능 연구소 설립
에어캐나다가 서비스 운영 및 고객 경험에 인공지능(AI)을 활용하기 위해 인공지능 연구소를 설립했다. AI가 미래 전략을 추진하기 위한 핵심 부분이 되고 있음을 보여준다.'퓨처트래블익스피리언스'에 따르면 에어캐나다의 사장겸 CEO인 칼린
2019-05-20
|
|
|
|
 |
[산업용 로봇] 미쓰비시전기, 동작 계획 전문 기업 '리얼타임 로보틱스'에 투자
미쓰비시전기가 동작 계획(motion-planning) 기술 전문기업 리얼타임 로보틱스(Realtime Robotics)에 투자했다고 로봇리포트가 보도했다. 보스턴에 본사를 둔 리얼타임 로보틱스는 이 투자금을 산업용 로봇의 안전과 성능을 개선하기 위한
2019-05-19
|
|
|
|
 |
[종합] 아마존, 물류 로봇 스타트업 '캔버스 테크놀로지' 인수
창고 운영은 지난 몇 년 동안 로봇 공학의 발전으로 막대한 이득을 보았다. 2018년 구글 통계에 따르면 전자상거래 사이트 방문자의 약 97%가 구매를 하지 않았음에도 불구하고, 전자상거래 구매 이행 요구는 계속 증가하고 있다. '콜로라도스프링
2019-05-19
|
|
|
|
 |
[종합] 미래 도시의 로봇 모습은 "4족 멀티 모달"
미래 도시 로봇은 어떤 모습일까?성균관대 로봇공학연구소(소장 문형필 교수)와 미국 UCLA 로멜라(RoMeLa)연구소(소장 데니스 홍 교수)가 지난 17일 성균관대 자연과학캠퍼스 의과대학 대강당에서 공동으로 지능형 로봇 국제공동연구사업 성과 시연회를
2019-05-19
|
|
|
|
 |
[종합] [ICROS 2019] 신약 개발에 도전하는 ‘시스템 생물학’
조광현 카이스트 교수는 경주 코오롱호텔 오운홀에서 열린 ‘ICROS 2019’ 두 번째 초청 강연에서 21세기 새로운 융합 학문인 ‘시스템 생물학(systems biology)’의 부상 배경과 중요한 흐름에 관해 발표했다.조광현 교수는 분자생물학에서
2019-05-18
|
|
|
|
 |
[종합] [ICROS 2019] 돌봄 로봇·스마트공장 로봇 기술 개발
한국산업기술평가관리원은 ‘ICROS 2019’에서 돌봄로봇 및 스마트공장용 중소기업 보급형 로봇 개발지원 사업 협약 설명회와 기술교류회를 가졌다. 돌봄 로봇과 스마트공장용 로봇 개발은 올해 정부가 중점적으로 추진 중인 사업으로 산학연의 큰 관심을 받고
2019-05-18
|
|
|
|
 |
[정책] 한-러, 인공지능 로봇 등 분야 협력 추진
과학기술정보통신부는 지난 16일 러시아 모스크바에서 '제13차 한–러 과학기술공동위원회'를 열고 인공지능 로봇 등 분야에서 협력하기로 했다고 밝혔다.이번 과기공동위 개최는 작년 6월 정상회담에서 양국 정상이 합의한 4차 산업혁
2019-05-18
|
|
|
|
 |
[종합] 中 메이디, 쿠카 인수 성과 기대 못 미쳐
유럽의 대형 로봇 기업을 인수한 중국 가전그룹이 기대에 미치지 못하는 성과로 골머리를 앓고 있다.중국 양광왕(央广网) 보도에 따르면 메이디(Midea)그룹(美的集团)은 지난 2018년 매출이 전년 대비 8.23%,
2019-05-18
|
|
|
|
 |
[미래기술] 풍력발전에 인공지능 기술 적용
산업용 인공지능 개발 전문 기업인 '오토시맨틱스(AUTOSEMANTICS)'는 발전설비 운영과 정비 및 신재생 에너지 전문 기업인 한국발전기술(KEPS) 및 한국플랜트서비스(HPS)와 공동으로 풍력발전기에 인공지능을 적용해 전력 생산량
2019-05-18
|
|
|
|
 |
[전문서비스 로봇] 中 톈진서 세계 수중 로봇 기술 각축
중국 톈진에서 세계 각국의 수중 로봇 기술간 경연이 펼쳐졌다.중국 신화사에 따르면 '2019 세계 수중 로봇 도전 대회'가 톈진 빈하이(滨海) 까오신구에서 열렸다. 이번 대회는 '물 속 세계에서 꿈을 쫓아 스마트 시대
2019-05-18
|
|
|
|
 |
[인공지능] 한컴그룹, 신한은행과 AI 등 사업 발굴 추진
한글과컴퓨터그룹(회장 김상철)과 신한은행(은행장 진옥동)이 AI 등 분야의 신사업 공동 추진을 위한 전략적 협력 관계를 구축한다.한컴그룹은 지난 17일 서울 중구 신한은행 본사에서 김상철 한컴그룹 회장과 진옥동 신한은행장 등 주요 관계자들이 참석한 가
2019-05-18
|
|
|
|
 |
[종합] 한국로봇산업협회 로봇SC,'일본 취업 매칭 행사' 진행
한국로봇산업협회 로봇인적자원개발협의체(로봇SC)는 채용 전문기업 '원티드Wanted)와 함께 일본 취업을 준비하는 사람들을 위한 일자리 매칭행사를 지난 16일 삼성 위워크에서 개최했다.이번 행사에는 일본기업 7개사가 약 50여개의 직무로 국내
2019-05-17
|
|
|
|
 |
[종합] [ICROS 2019] 이안 피터슨 교수 초청 강연
ICROS 2019에서 호주국립대 이안 피터슨(Ian Petersen) 교수는 ‘불확실성을 갖는 시스템의 강인 제어(Robust Control of Uncertain Systems)’를 주제로 초청 강연을 진행했다.이번 발표는 “I. R. Peters
2019-05-16
|
|
|





