| 기사 (전체 27,467건) |
  |
|
|
 |
[종합] '협업' 대신 '협동'로봇으로 쓰세요
공장 내에서 작업자와 함께 손발을 맞춰 일하는 로봇을 부르던 ‘협업’로봇을 ‘협동’로봇으로 불러야 한다고 14일 한국로봇산업협회가 밝혔다. 로봇산업협회에 따르면, ‘협업’로봇도 콜래보레이티브(Collaborative) 로봇의 사전적 의미를 직역한 것으
2016-01-14
|
|
|
|
 |
[로봇카] 구글 로봇카 시험주행결과 "아직 혼자는 무리"
구글 로봇카의 14개월 간 시험 주행 결과 13건의 준사고(Near-Miss Incidents)가 발생한 것으로 나타났다. 아직은 온전히 로봇 혼자서 운전할 수 없다는 의미다. 과학기술 전문매체 IEEE 스펙트럼에 따르면, 구글의 지주사 ‘알파벳’의
2016-01-14
|
|
|
|
 |
[종합] 가정용 로봇을 위한 5가지 도전 과제
1960년대 미국 인기 TV 애니메이션 시리즈 ‘우주가족 젯슨(The Jetsons)’은 2060년대의 일상생활 모습을 상상으로 그려냈다. 이 애니메이션에는 가사도우미 로봇 '로지(Rosie)'가 등장해 요리를 비롯한 각종 집안일을 척척 해낸다. 공상
2016-01-14
|
|
|
|
 |
[로봇카] 로봇카 최초, ZMP로봇택시 일반시승 이벤트
15일까지 열리는 '오토모티브 월드 2016'에서 일본 로봇자동차 분야 벤처기업 ZMP는 가나가와 현에서 2월 29일 ~ 3월 11일에 실시하는 일반인을 위한 로봇 택시 체험 이벤트에 임대할 "시판중인 미니밴 기반 로봇 카(RoboCar MiniVan
2016-01-14
|
|
|
|
 |
[전문서비스 로봇] 인텔, 로봇 스타트업 '새비오크'에 '베팅'
인텔이 서비스 로봇업체인 ‘새비오크(Savioke)'에 거금을 투자했다. 최근 인텔은 드론과 로봇 분야에 신규 투자를 확대하는 등 로봇, 드론 분야를 새로운 성장 엔진으로 집중 육성하고 있다. 모바일 프로세서 분야에서 후발 업체인 ARM홀딩스에 뒤진
2016-01-14
|
|
|
|
|
|
|
 |
[종합] 'CES 2016' 로봇 스타트업 '베스트 10'
지난주 라스베이거스에서 열린 ‘CES 2016'에선 로봇 분야 스타트업들이 ’유레카 파크‘ 전시장에 새로운 로봇들을 선보였다. 로봇 전문매체인 ’로보틱스 트렌즈닷컴‘은 이번 CES에서 주목받은 로봇 스타트업의 10개 제품을 선정해 보도했다.▲ 소마바(
2016-01-14
|
|
|
|
 |
[종합] 중국 하이난 공항 '서비스 로봇' 도입
중국의 휴양지로 유명한 하이난성 '하이커우 메이란 국제공항'에 서비스 로봇이 도입돼 시험 운영에 들어갔다. 공항 당국은 이달 7일부터 '메이메이', '란란' 등 2대의 스마트 로봇을 VIP실과 1등석 라운지에 투입했다. 이 서비스 로봇은 공항 이용객들
2016-01-14
|
|
|
|
 |
[드론] 독일, 군용드론 개발 위해 '이스라엘제' 임대
독일군이 이스라엘 드론으로 무장할 예정이다. 미국 군사전문매체 디펜스뉴스가 ‘우르줄라 폰 데어 라이엔’ 독일 국방장관의 말을 빌려 “독일이 연방군과 해외 파병 독일군 보호를 위해 이스라엘의 군용드론을 장기임대 할 계획”이라고 13일(현지시간) 보도했다
2016-01-14
|
|
|
|
 |
[로봇카] 대구시, "자율주행차" 전략산업 선정
대구시는 지역 전략산업으로 선정된 자율주행 자동차의 선도과제 발굴 및 사업화를 위해 지역전략산업추진단과 지역기업협의회를 구성, 본격적인 사업추진에 나선다. 지역전략산업추진단에는 대구시를 비롯해 대구창조경제혁신센터, 대구테크노폴리스, 지능형자동차부품진흥
2016-01-13
|
|
|
|
| [인사] 조달청
◇ 조달청 인사 (2016. 1. 14일字) - 서기관 승진 △ 기획조정관실 창조행정담당관실 양재규 △ 구매사업국 쇼핑몰기획과 안경훈 △ 시설사업국 시설총괄과 박수천 △ 시설사업국 공사관리과 박영근
2016-01-13
|
|
|
|
 |
[종합] 로봇 격투쇼 '로봇워' 리부트 된다
영국 BBC 채널의 유명한 로봇격투 프로그램 ‘로봇워(Robot Wars)가 리부트 된다. 영국 연예매체 ‘브로드캐스트’는 세계 17개국 2000만 시청자를 확보한 로봇격투대회의 고전 명작 ‘로봇워’가 새롭게 제작된다고 전했다. 로봇워는 방탄유리로 둘
2016-01-13
|
|
|
|
 |
[3D 프린팅] 울산과학관, 3D프린터로 만든 로봇 댄서 공연
울산과학관(관장 노병수)이 3월부터 과학관 로비에서 3D프린터로 제작한 로봇들의 댄스 퍼포먼스를 선보인다. 댄서로 선정된 로봇은 ‘3D프린팅 콘퍼런스 2015’ 일반부 대상을 수상한 6족 보행로봇이다. 지난 9일과 10일 과학관에서 진행한 ‘무한상상실
2016-01-13
|
|
|
|
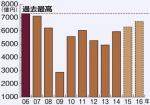 |
[종합] 2016년 일본 로봇 생산액 6700억엔 규모
일본 로봇공업회(JRA)가 2016년 일본내 로봇 생산액 목표를 전년대비 6.3% 증가한 6700억엔으로 설정했다고 일본 일간공업신문이 13일 보도했다. 해외 생산분을 포함하면 과거 대비 최고 수준이 될 것으로 전망하면서도, 중국 성장 둔화가 뚜렷해질
2016-01-13
|
|
|
|
 |
[미래기술] 에어버스, '불법침입' 드론 대응 시스템 개발
에어버스가 자동으로 불법 침입한 드론에 대응하는 새로운 ‘드론킬러’ 시스템을 공개했다. 지난해 5월, 민간 소형 드론이 백악관 영내에 추락하는 사고가 발생했다. 이후 록히드마틴이나 노스롭그루먼 같은 대형 군수산업체가 레이저 등을 이용한 병기 개념의 드
2016-01-13
|
|
|
|
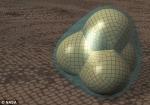 |
[종합] NASA, 차세대 화성탐사 로봇은 '젤리'
미국항공우주국(NASA)의 차기 화성 탐사로봇은 주머니 가득 젤리가 채워진 ‘벌레’ 모양이 될 전망이다. 지난 6일 NASA가 미국 특허상표국(U.S. Patent and Trademark Office)에 새로운 탐사로봇디자인 특허를 신청한 것이 포착
2016-01-13
|
|
|
|
 |
[드론] [화제 영상]美 미시간공대, 드론 포획시스템 개발
미국 미시간공대 '인간-인터랙티브 로보틱스 연구소(Human-Interactive Robotics Lab)'가 드론 포획 시스템에 대한 특허를 획득했다. 8개의 날개를 가진 대형 멀티콥터 드론이 소형 드론을 향해 망(Net)을 던져 포획하는 기술이다.
2016-01-13
|
|
|
|
 |
[전문서비스 로봇] 그리스 해안경비대, 로봇으로 난민 구조
그리스 해안경비대가 원격 조정 로봇을 활용해 시리아 난민 구조 활동을 벌일 계획이라고 인터넷 매체인 ‘와이어드’가 보도했다. 시리아 내전이 격화되면서 매일 평균 2000명 정도의 난민이 지중해를 거쳐 그리스 해안의 ‘레스보스(Lesvos)' 섬으로 들
2016-01-13
|
|
|
|
 |
[종합] "응답하라 필레", 마지막 시도
유럽우주기구(ESA)는 지난 10일(현지시간) 혜성 ‘67P/추류모프-게라시멘코’에 착륙한 뒤 교신이 끊긴 탐사로봇 ‘필레’를 깨우는 마지막 명령을 전달했다고 밝혔다. 이번 깨우기 시도가 마지막인 이유는 혜성 67P가 태양에서 멀어지고 있기 때문이다.
2016-01-13
|
|
|
|
 |
[종합] GM, 순수 전기차 쉐보레 볼트 EV 상세 제원 첫 공개
글로벌 브랜드 쉐보레(Chevrolet)는 11일(미국 시간) 프레스 데이(Press Day)를 시작으로 미국 디트로이트 코보 센터(Cobo Center)에서 개막하는 ‘2016 북미 국제 오토쇼(North America International Au
2016-01-12
|
|
|






