| 기사 (전체 396건) |
  |
|
|
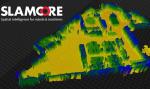 |
[로봇 부품·소프트웨어] 영국 슬램코어, 텍사스 인스트루먼트 프로세서에 공간 지능 알고리즘 최적화
영국 슬램코어(SLAMcore)는 자사의 공간지능 알고리즘을 텍사스 인스트루먼트의 ‘TDA4x’ 프로세서에 최적화했다고 12일(현지 시각) 밝혔다. 이번 최적화를 통해 다양한 산업 자동화 및 로봇이 매우 정확하고 강력한 위치확인(localization
2023-04-14
|
|
|
|
 |
[로봇 부품·소프트웨어] 아마존, 픽앤플레이스 로봇 훈련용 데이터세트 ‘암벤치’ 공개
아마존이 픽앤플레이스 작업용 로봇 훈련에 사용할 수 있는 19만개 이상의 물체 이미지가 포함된 데이터 세트를 출시했다고 더로봇리포트가 11일(현지시각) 보도했다.암벤치(ARMBench)로 불리는 이 데이터 세트는 새로운 객체와 맥락을 더 잘 일반화하기
2023-04-14
|
|
|
|
 |
[로봇 부품·소프트웨어] 영국 캠브리지대 연구팀, 다양한 물체 잡는 저비용 로봇핸드 개발
영국 캠브리지대 연구팀이 손목의 움직임과 피부의 느낌만으로 다양한 물체를 파지할 수 있는 저비용의 에너지 효율적인 로봇 핸드를 개발했다고 12일(현지 시각) 밝혔다.이 로봇핸드는 3D 프린팅 기술을 적용해 제작했으며, 각각의 손가락들은 독립적으로 움직
2023-04-13
|
|
|
|
 |
[로봇 부품·소프트웨어] 세븐센스 로보틱스, '로지맷 2023'서 비주얼 슬램 기술 선봬
스위스 취리히에 위치한 세븐센스 로보틱스(Sevensense Robotics)가 이달 25~28일 나흘간 독일 슈트트가르트에서 열리는 ‘로지맷(LogiMat) 2023’ 전시회에 비주얼 슬램(visual simultaneous localization
2023-04-12
|
|
|
|
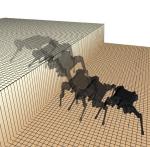 |
[로봇 부품·소프트웨어] 美CMU, 극단적인 지형에서도 안정적 보행 가능한 기술 개발
美카네기멜론대(CMU) 연구팀은 바위가 많거나, 극단적인 지형에서 다리 로봇(legged robots)에게 안정적인 이동 능력을 제공하는 새로운 접근법을 도출했다고 7일(현지 시각) 밝혔다.연구팀은 아카이브(arXiv)에 사전 발표된 논문에서 동물의
2023-04-10
|
|
|
|
 |
[로봇 부품·소프트웨어] 코그넥스, 고속 스마트 카메라 ’인사이트 3800’ 출시
머신비전 전문기업 코그넥스코리아(대표 알렉스 종)가 강력한 규칙 기반 툴과 AI 기술을 활용하는 엣지러닝 툴이 내장된 스마트 카메라 ‘인사이트 3800(IN-SIGHT 3800)을 출시했다고 10일 밝혔다.신제품 인사이트 3800은 이전 세대 제품보다
2023-04-10
|
|
|
|
 |
[로봇 부품·소프트웨어] 야스카와, ‘모토픽4’ SW 발표
일본 야스카와가 모토픽4(MotoPick 4) 소프트웨어(SW)와 로봇 팔레트 빌더를 발표했다고 더로봇리포트가 4일(현지시각) 보도했다.이에 따르면 야스카와는 노코드 기능을 추가한 고속 픽앤플레이스용 모토픽4 SW 시스템을 출시했다. 이 회사는 또한
2023-04-09
|
|
|
|
 |
[로봇 부품·소프트웨어] 로보토AI, 시드머니 480만달러 유치
로보토AI(Roboto AI)가 480만달러의 시드 머니(종자돈)를 확보했다고 6일(현지 시각) 밝혔다.로보토AI는 지난 2022년 앨런인공지능연구소(Allen Institute for Artificial Intelligence)에서 분사했으며 워싱턴
2023-04-07
|
|
|
|
 |
[로봇 부품·소프트웨어] WMS 전문기업 '시너지', 물류창고 로봇 관리 통합 플랫폼 출시
WMS(창고관리시스템) 전문기업인 시너지(Synergy)가 물류창고 내의 모든 자동화 및 로봇 시스템을 조정할 수 있는 중앙집중식 통합 플랫폼을 출시했다고 '로보틱스247'이 3일 보도했다.스냅 컨트롤(SnapControl)로 불리는 이
2023-04-06
|
|
|
|
|
|
|
 |
[로봇 부품·소프트웨어] 장영진 차관, “소부장 정책 지속 추진” 약속
산업통상자원부 장영진 1차관이 5일 경남 창원에 위치한 소부장 으뜸기업 하이젠모터를 방문해, 소부장(소재ㆍ부품ㆍ장비) 정책을 일관되고 지속적으로 추진하면서, 국내 소부장 생태계 확장을 위한 글로벌 협력도 확대해 나가겠다고 밝혔다.하이젠모터는 1963년
2023-04-05
|
|
|
|
 |
[로봇 부품·소프트웨어] 호주 시드니공대 연구팀, '뇌-기계 인터페이스'위한 건식 센서 개발
호주 시드니공대 연구팀이 ‘뇌-기계 인터페이스’(BMI·brain-machine interfaces)에 활용할 수 있는 건식 센서를 개발했다고 3일(현지 시각) 밝혔다. 이 건식센서를 헤드밴드에 장착하면 로봇을 생각만으로 제어할 수 있다.시드니공대 연
2023-04-05
|
|
|
|
 |
[로봇 부품·소프트웨어] MIT, 한번 파지(把持)로 물체 식별하는 로봇 핸드 개발
MIT 연구팀은 사람의 손가락에서 영감을 받아, 고해상도 터치 감지 능력을 활용해 물체를 한번 파지(把持)한 후 정확하게 물체를 식별할 수 있는 로봇핸드를 개발했다고 3일(현지 시각) 밝혔다.연구팀에 따르면 많은 로봇핸드는 강력한 센서를 손가락 끝 부
2023-04-04
|
|
|
|
 |
[로봇 부품·소프트웨어] 중국 유니트리 로보틱스, 라이다 사업 진출
중국 로봇 전문기업 유니트리 로보틱스(Unitree Robotics:宇树科技)가 로봇핵심 부품인 라이다 시장에 진출했다. 유니트리 로보틱스는 중국의 대표적인 4족 보행 로봇 전문기업이다.유니트리 로보틱스는 360도*90도의 시야각(FOV)
2023-04-04
|
|
|
|
|
|
|
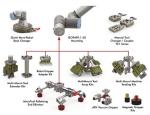 |
[로봇 부품·소프트웨어] 美 데스타코, 협동 로봇용 EOAT(End-Of-Arm-Tool) 출시
미국 미시건주 소재 데스타코(Destaco)가 협동 로봇팔용 EOAT(End-of-Arm Tooling·EOAT, 로봇팔 종단장치) 솔루션 포트폴리오를 출시했다고 더로봇리포트가 2일(현지시각) 보도했다.이 다양한 툴링 솔루션은 최대 10kg의 탑재물
2023-04-03
|
|
|
|
 |
[로봇 부품·소프트웨어] 4월 개최 전국고교야구대회, 로봇심판 도입한다
대한야구소프트볼협회(회장 이종훈, KBSA)는 28일 14시 자동 볼·스트라이크 판정시스템(로봇심판)을 전국고교야구대회에 도입하기 위한 시연회를 대전 한화생명 이글스파크에서 개최한다. 협회는 로봇심판 도입으로 스포츠 4대악인 입시비리를 사전에 차단하고
2023-03-27
|
|
|
|
 |
[로봇 부품·소프트웨어] 美 앰비로보틱스, 클라우드 기반 인텔리전스 툴 발표
미국 샌프란시스코 만에 본사를 둔 앰비로보틱스(Ambi Robotics)가 창고 물품 분류 작업을 최적화하는 앰비 액세스(AmbiAccess)를 발표했다고 더로봇리포트가 22일(현지시각) 보도했다.앰비로보틱스의 창고자동화 솔루션인 앰비 액세스는 클라우
2023-03-27
|
|
|
|
 |
[로봇 부품·소프트웨어] 현대차-딥엑스, 로봇 플랫폼용 AI 반도체 탑재 협력 연구
현대자동차ㆍ기아가 최첨단 로보틱스 서비스 개발을 위해 AI 반도체 전문 기업과 손을 잡는다.현대자동차ㆍ기아는 24일 의왕연구소에서 로보틱스랩장 현동진 상무와 딥엑스(DEEPX) 김녹원 대표 등 양사 관계자들이 참석한 가운데 ‘로봇 플랫폼용 AI 반도체
2023-03-24
|
|
|
|
 |
[로봇 부품·소프트웨어] 에스피지, '2023 소부장 으뜸기업' 선정
초정밀 감속기 등 로봇 구동기 전문기업 에스피지(대표 여영길)가 22일 산업통상자원부로부터 소재ㆍ부품ㆍ장비(소부장) 으뜸기업에 선정되었다고 밝혔다.에스피지는 22일 한국프레스센터에서 열린 '2023년 으뜸기업 지정식'에서 산업부 장영진
2023-03-22
|
|
|







